Topics
Mathematical Logic
Matrices
Differentiation
Applications of Derivatives
Integration
Definite Integration
Applications of Definite Integration
- Standard Forms of Parabola and Their Shapes
- Ellipse and its Types
- Area Under Simple Curves
- Overview of Application of Definite Integration
Differential Equation and Applications
- Basic Concepts of Differential Equations
- Order and Degree of a Differential Equation
- Formation of Differential Equation by Eliminating Arbitary Constant
- Methods of Solving Differential Equations> Variable Separable Differential Equations
- Methods of Solving Differential Equations> Homogeneous Differential Equations
- Methods of Solving Differential Equations>Linear Differential Equations
- Applications of Differential Equation
- Overview of Differential Equations
Commission, Brokerage and Discount
- Commission and Brokerage Agent
- Concept of Discount
- Overview of Commission, Brokerage and Discount
Insurance and Annuity
- Insurance
- Types of Insurance
- Annuity
- Overview of Insurance and Annuity
Linear Regression
- Regression
- Types of Linear Regression
- Fitting Simple Linear Regression
- The Method of Least Squares
- Lines of Regression of X on Y and Y on X Or Equation of Line of Regression
- Properties of Regression Coefficients
- Overview: Linear Regression
Time Series
- Introduction to Time Series
- Uses of Time Series Analysis
- Components of a Time Series
- Mathematical Models
- Measurement of Secular Trend
- Overview of Time Series
Index Numbers
- Weighted Aggregate Method
- Cost of Living Index Number
- Method of Constructing Cost of Living Index Numbers - Aggregative Expenditure Method
- Overview of Index Numbers
- Method of Constructing Cost of Living Index Numbers - Family Budget Method
- Uses of Cost of Living Index Number
Linear Programming
Assignment Problem and Sequencing
- Assignment Problem
- Hungarian Method of Solving Assignment Problem
- Special Cases of Assignment Problem
- Sequencing Problem
- Types of Sequencing Problem
- Finding an Optimal Sequence
- Overview of Assignment Problem and Sequencing
Probability Distributions
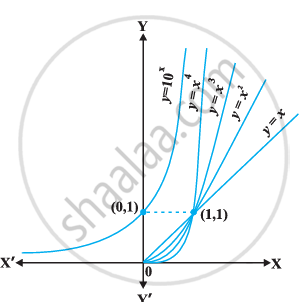
Definition: Exponential function
A function of the form \[y = b^x\], where b > 0 and \[b \neq 1\], is called an exponential function.
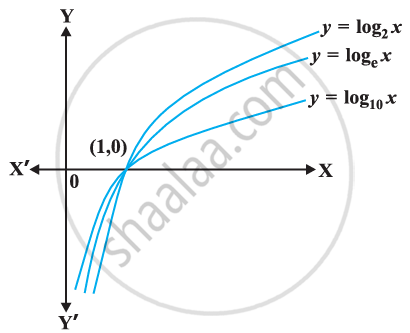
Definition: Logarithmic function
If b > 0, \[b \neq 1\], and a > 0, then
This means a logarithm tells the exponent to which the base must be raised to obtain the number.
Logarithmic Rules
-
Change of Base: \[\log_a p = \frac{\log_b p}{\log_b a}\]
-
Product Rule: \[\log_b(pq) = \log_b p + \log_b q\]
-
Quotient Rule: \[\log_b(\frac{x}{y}) = \log_b x - \log_b y\]
-
Power Rule: \[\log_b(p^n) = n \log_b p\]
-
Inverse Property: \[x = e^{\log x}\] (valid only for x > 0)
Graphical Properties & Domains:
Exponential (\[y=b^x\]):
-
Domain: All real numbers (\[\mathbb{R}\]).
-
Range: All positive real numbers.
-
Key Coordinate: The graph always passes through the point (0, 1).
-
Behavior: The function is increasing for b > 1 and decreasing for 0 < b < 1.
Logarithmic (\[y=\log_b x\]):
-
Domain: Strictly positive real numbers (\[\mathbb{R}^+\]).
-
Range: All real numbers (\[\mathbb{R}\]).
-
Key Coordinate: The graph always passes through the point \[(1, 0)\].
-
Relationship: The graph is a mirror image of the exponential function (\[y = b^x\]), reflected perfectly across the diagonal line y = x.
Example 1
Differentiate the following w.r.t. \[x\]:
- \[e^{-x}\]
- \[\sin (\log x), x > 0\]
- \[\cos^{-1} (e^{x})\]
- \[e^{\cos x}\]
Solution:
(i) Let \[y = e^{-x}\]. Using the chain rule, we have
(ii) Let \[y = \sin (\log x)\]. Using the chain rule, we have \[\frac{dy}{dx} = \cos (\log x) \cdot \frac{d}{dx} (\log x) = \frac{\cos (\log x)}{x}\]
(iii) Let \[y = \cos^{-1}(e^x)\]. Using the chain rule, we have
(iv) Let \[y = e^{\cos x}\]. Using the chain rule, we have
Key Points: Exponential and Logarithmic Functions
-
Exponential function: \[y = b^x\], domain = all real numbers, range = positive real numbers.
-
Logarithmic function: \[y = \log_b x\], domain = positive real numbers, range = all real numbers.
-
Exponential and logarithmic functions are inverses of each other.
-
\[e^x\] and log x are especially important in calculus.
-
Main log laws: product, quotient, power, and change of base.
-
Standard derivatives: \[\frac{d}{dx}(e^x) = e^x\],
\[\frac{d}{dx}(\log x) = \frac{1}{x}\].
