Topics
Sets, Relations, and Functions
- Sets and Their Representations
- Classification of Sets
- Empty Set (Null or Void Set)
- Finite and Infinite Sets
- Equal Sets
- Subsets
- Power Set
- Universal Set
- Venn Diagrams
- Union of Sets
- Intersection of Sets
- Disjoint Sets
- Difference of Sets
- Complement of a Set
- Practical Problems on Union and Intersection of Two Sets
- Algebra of Real Functions
- Algebraic Operations on Functions
Complex Numbers and Quadratic Equations
- Introduction of Complex Number
- Concept of Complex Numbers
- Complex Numbers as Ordered Pairs of Reals
- Representation of Complex Numbers
- Argand Plane and Polar Representation
- Algebraic Operations of Complex Numbers
- Properties of Conjugate, Modulus and Argument (or Amplitude) of Complex Numbers
- Square Root of a Complex Number
- Triangle Inequality
- Integral Powers of Iota
- Rotational Theorem of Complex Number
- Cube Root of Unity
- Geometry of Complex Numbers
- Demoiver's Theorem
- Powers of Complex Numbers
- Sum and Product of Root
- Nature of Roots of a Quadratic Equation
- Formation of a Quadratic Equation with Given Roots
- Quadratic Formula (Shreedharacharya's Rule)
- Condition for Common Roots
- Maximum and Minimum Value of Quadratic Equation
- Quadratic Expression in Two Variables
- Solution of Quadratic Inequalities
Matrices and Determinants
- Concept of Matrices
- Operations on Matrices>Scalar Multiplication
- Operations on Matrices> Addition and Subtraction of Matrices
- Operations on Matrices>Scalar Multiplication
- Operations on Matrices> Matrix Multiplication
- Types of Matrices
- Determinant of a Matrix
- Properties of Determinants
- Evaluation of Determinants
- Area of a Triangle Using Determinants
- Adjoint & Inverse of Matrix
- Inverse of a Square Matrix by the Adjoint Method
- Test of Consistency
- Applications of Determinants and Matrices
- Transpose of a Matrix
- Symmetric and Skew Symmetric Matrices
- Multiplication of Two Determinants
- Minors and Co-factors
- Some Special Cases of Matrix
- Rank of a Matrix
Permutations and Combinations
- Permutations
- Fundamental Principles of Counting
- Combination
- Meaning of P (n,r) and C (n,r)
- Simple Applications of Permutations and Combinations
- Factorials
- Division and Distribution of Objects
- Dearrangement Theorem
- Sum of Numbers
- Important Result About Point
Mathematical Inductions
- Mathematical Induction
- Principle of Mathematical Induction
- Motivation
- Simple Applications of Mathematical Induction
Binomial Theorem and Its Simple Applications
- Introduction of Binomial Theorem
- Binomial Theorem for Positive Integral Indices
- General and Middle Terms
- Properties of Binomial Coefficient with Simple Application
- Expansion of Binomial
- Coefficient of Any Power of 'X'
- Greatest Term
- Independent Term
- Particular Term from End in Binomial Expansion
- Greatest Binomial Coefficients
- Number of Terms in the Expansion of (x + y + z)n
- Multinomial Theorem
- Infinite Series
- Binomial Theorem for Any Index (Without Proof)
Sequence and Series
- Sequence, Series, and Progression
- Relation Between Arithmetic Mean (A.M.), Geometric Mean (G.M.), Harmonic Mean (H.M.)
- Arithmetico-geometric Sequence
- Arithmetic Progression (A.P.)
- Geometric Progression (G. P.)
- Harmonic Progression (H. P.)
- Insertion of Arithmetic
- Geometric Mean
- Sum to' n' Terms of a Geometric Progression
- Some Special Sequences
Limit, Continuity, and Differentiability
- Concept of Limits
- Limits by Factorisation, Substitution and Rationalisation
- Algebra of Limits
- Limits of Polynomials and Rational Functions
- Limits of Logarithmic Functions
- Limits of Exponential Functions
- Limits of Trigonometric Functions
- Inverse Functions
- Graphs of Simple Functions
- Continuous and Discontinuous Functions
- Concept of Differentiability
- Differentiation of the Sum, Difference, Product, and Quotient of Two Functions
- Derivatives of Composite Functions
- Derivative of Inverse Function
- Derivative of Inverse Function
- Exponential and Logarithmic Functions
- Exponential and Logarithmic Functions
- Derivatives of Composite Functions
- Derivative of Implicit Functions
- Derivatives of Functions in Parametric Forms
- Second Order Derivative
- Mean Value Theorem
- Simple Problems on Applications of Derivatives
- Rate of Change of Quantities
- Increasing and Decreasing Functions
- Maxima and Minima
- Tangents and Normals
- Limits Using L-hospital's Rule
- Evaluation of Limits
- Infinite Series
- Successive Differentiation
- nth Derivative of Standard Functions
- Algebra of Derivative (Leibnitz or Product Rule)
- Rolle's Theorem
- Lagrange's Mean Value Theorem (LMVT)
- Approximations
Integral Calculas
- Integration
- Integration as an Inverse Process of Differentiation
- Fundamental Integrals Involving Algebraic Functions
- Fundamental Integrals Involving Trigonometric Functions
- Fundamental Integrals Involving Exponential Functions
- Fundamental Integrals Involving Logarithms Functions
- Methods of Integration> Integration by Substitution
- Methods of Integration> Integration by Parts
- Methods of Integration> Integration Using Partial Fraction
- Methods of Integration>Integration Using Trigonometric Identities
- Integrals of Some Particular Functions
- Definite Integral as the Limit of a Sum
- Fundamental Theorem of Integral Calculus
- Properties of Definite Integrals
- Evaluation of Definite Integrals by Substitution
- Area Bounded by Two Curves
- Area Under Simple Curves
- Integration of Some Special Irrational Algebraic Functions
- Summation of Series by Integration
Diffrential Equations
- Introduction to Ordinary Differential Equations
- Formation of Ordinary Differential Equations
- Order and Degree of a Differential Equation
- Formation of Differential Equations
- General and Particular Solutions of a Differential Equation
- Solutions of Linear Differential Equation
- Methods of Solving First Order, First Degree Differential Equations
- Methods of Solving Differential Equations> Variable Separable Differential Equations
- Methods of Solving Differential Equations> Homogeneous Differential Equations
- Methods of Solving Differential Equations>Linear Differential Equations
- Solution by Inspection Method
Co-ordinate Geometry
- Brief Review of Cartesian System of Rectanglar Co-ordinates
- Distance Formula
- Section Formula in Coordinate Geometry
- Locus
- Translation of Axes
- Concept of Slope (or, gradient)
- Parallel and Perpendicular Lines
- Intercepts on Axes
- Various Forms of the Equation of a Line
- Intersection of Two Lines
- Angle Between Two Lines
- Conditions for Concurrence of Three Lines
- Distance in Lines (Point & Parallel Lines)
- Equations of Line in Different Forms
- Equations of Internal and External by Sectors of Angles Between Two Lines Co-ordinate of the Centroid, Orthocentre, and Circumcentre of a Triangle
- Equations of Internal and External by Sectors of Angles Between Two Lines Co-ordinate of the Centroid, Orthocentre, and Circumcentre of a Triangle
- Equation of Family of Lines Passing Through the Point of Intersection of Two Lines
- Equations of a Circle in Standard Form
- Equations of a Circle in General Form
- Equation of a Circle When the Endpoints of a Diameter Are Given
- Point of Intersection of a Line and a Circle
- Equation of Tangent and Condition of Tangency
- Fundamentals of Conic Sections
- Parabola and its types
- Hyperbola and its Types
- Ellipse and its Types
- Condition for Y = mx + c to Be a Tangent and Point(s) of Tangency
- Results of Triangle
- Various Forms of Equation of a Line
- Shortest Distance Between Two Lines
- Bisector of the Angle Between the Two Lines
- Distance in Lines (Point & Parallel Lines)
- Foot of the Perpendicular
- Position of a Point with Respect to a Line
- Pedal Points
- Pair of Straight Lines
- Advanced Concept of Circle
- Standard Equation of a Circle
Three Dimensional Geometry
- Three - Dimensional Geometry
- Coordinates of a Point in Space
- Distance Between Two Points
- Section Formula in Coordinate Geometry
- Direction Ratios, Direction Cosine & Direction Angles
- Direction Cosines and Direction Ratios of a Line
- The Angle Between Two Intersecting Lines
- Skew Lines
- Shortest Distance Between Two Lines
- Equations of Line in Different Forms
- Equations of a Plane in Different Forms
- Intersection of the Line and Plane
- Coplanarity of Two Lines
- Angle Between Two Lines
- Projection of a Point on a Line
- Projection of a Line Segment Joining Two Points
- Equation of a Straight Line in Cartesian and Vector Form
- Concept of Slope (or, gradient)
- Distance in Lines (Point & Parallel Lines)
- Shortest Distance Between Two Lines
- Different Forms of Equation of a Plane
- Equation of a Plane
- Equation of Plane Passing Through the Intersection of Two Given Planes
- Angle Between Two Planes
- Angle Between Line and a Plane
- Distance Between Two Parallel Planes
- Position of Point and Line wrt a Plane
- Projection of a Line on a Plane
Vector Algebra
- Basic Concepts of Vector Algebra
- Vector Analysis
- Vector Operations>Addition and Subtraction of Vectors
- Components of Vector in Algebra
- Multiplication of Vectors>Scalar Product(Dot Product)
- Scalar Triple Product
- Vector Triple Product
- Basic Concepts of Vector Algebra
- Section Formula in Coordinate Geometry
- Linear Dependent and Independent Vectors
- Position Vector of a Point in a Space
- Modulus of a Vector
- Collinearity of Three Points
- Coplanarity of Three Vectors and Four Points
- Vector Inequality
- Product of Two Vectors
- Projection of a Vector Along Any Other Vector
- Area of a Parallelogram
- Geometric Interpretation of the Area of a Triangle
Statistics and Probability
- Measures of Discretion
- Arithmetic Mean
- Mean of Grouped Data
- Basic Concept of Median
- Basic Concept of Mode
- Standard Deviation
- Variance
- Mean Deviation
- Geometric Mean
- Harmonic Mean (H.M.)
- Coefficient of Variation
- Addition Theorem of Probability
- Multiplication Theorem of Probability
- Bayes’ Theorem
- Probability using Binomial Distribution
- Concept of Probability
- Elementary Types of Events and Properties of Probability
- Odds in Favour and Against
- Boole's Inequality
- Demorgan's Law
- Independent Events
- Conditional Probability
- Probability Distribution of Discrete Random Variables
- Poisson Distribution
Trigonometry
- Trigonometric Identities (Square Relations)
- Trigonometric Equations
- Trigonometric Functions
- Properties of Inverse Trigonometric Functions
- Angles of Elevation and Depression
- Circular System
- Trigonometric Ratios
- Domain and Range of Trigonometric Functions
- Trigonometric Functions of Allied Angels
- Conditional Trigonometric Identities
- Greatest and Least Value of Trigonometric Expressions
- Solution of Trigonometric Equations (Solution in the Specified Range)
- Intervals for Inverse Trigonometric Functions
- Infinite Series of Inverse Trigonometric Functions
Mathematical Reasoning
- Mathematical Reasoning
- Introduction of Validating Statements
- Mathematically Acceptable Statements
- Statements and Truth Values in Mathematical Logic
- Tautology, Contradiction, and Contingency
- Logical Connective
- Truth Tables
- Logical Equivalance
- Quantifier, Quantified and Duality Statements in Logic
- Converse, Inverse and Contrapositive of the Conditional Staternent
- Negative of a Compound Statement
- Algebra of Statements
Linear Inequality
- Linear Inequations
- Method of Solving a Linear Inequality
- System of Linear Inequalities
- Inequalities of Various Functions
Properties of Triangles
- Properties of Triangle
- Solutions of Triangle
- Geometrical Concepts Related to a Circle
- Advanced Regular Polygon
- Angles of Elevation and Depression
Estimated time: 2 minutes
Notes
Observe that if θ is an angle between the two planes, then so is 180 – θ Fig.
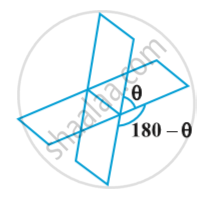
If `vec n _1` and `vec n_2` are normals to the planes and θ be the angle between the planes
`vec r . vec n _1 = d_1` and `vec r . vec n _2 = d_2` .
Then θ is the angle between the normals to the planes drawn from some common point We have
cos θ = `|(vec n_1 . vec n_2)/ (|vec n _1| |vec n_2|)|`
Cartesian form
Let θ be the angle between the planes,
`A_1x + B_1y +C_1z + D_1 = 0` and `A_2x +B_2y + C_2 z + D_2 = 0`
The direction ratios of the normal to the planes are `A_1, B_1, C_1` and `A_2, B_2, C_2` respectively.
Therefore , cos θ = `|(A_1 A_2 + B_1 B_2 + C_1 C_2)/ (sqrt(A_1^2 + B_1^2 + C_1^2 ) sqrt (A_2^2 + B_2^2 +C_2^2))|`
Video Tutorials
Shaalaa.com | Three Dimensional Geometry Part 6 - The Plane
to track your progress
