Topics
Relations and Functions
Relations and Functions
Inverse Trigonometric Functions
- Basics of Inverse Trigonometric Functions
- Domain, Range & Principal Value
- Graphs of Inverse Trigonometric Functions
- Properties of Inverse Trigonometric Functions > Self-adjusting Property
- Overview of Inverse Trigonometric Functions
- Properties of Inverse Trigonometric Functions > Reciprocal Property
- Properties of Inverse Trigonometric Functions > Negative Argument Property
- Properties of Inverse Trigonometric Functions > Complementary Property
- Properties of Inverse Trigonometric Functions > Conversion Property
- Properties of Inverse Trigonometric Functions > Addition & Subtraction Formula for Inverse Tangent
- Properties of Inverse Trigonometric Functions > Double-angle Property
- Properties of Inverse Trigonometric Functions > Triple-angle Property
- Properties of Inverse Trigonometric Functions > Addition–Subtraction Formula for Inverse Sine & Cosine
Algebra
Matrices
- Concept of Matrices
- Types of Matrices
- Equality of Matrices
- Operations on Matrices> Addition and Subtraction of Matrices
- Operations on Matrices>Scalar Multiplication
- Operations on Matrices> Matrix Multiplication
- Transpose of a Matrix
- Symmetric and Skew Symmetric Matrices
- Invertible Matrices
- Overview of Matrices
Calculus
Determinants
Vectors and Three-dimensional Geometry
Continuity and Differentiability
- Continuous and Discontinuous Functions
- Algebra of Continuous Functions
- Concept of Differentiability
- Derivatives of Composite Functions
- Derivative of Implicit Functions
- Derivative of Inverse Function
- Exponential and Logarithmic Functions
- Logarithmic Differentiation
- Derivatives of Functions in Parametric Forms
- Second Order Derivative
- Overview of Continuity and Differentiability
Linear Programming
Probability
Applications of Derivatives
Integrals
- Introduction of Integrals
- Integration as an Inverse Process of Differentiation
- Properties of Indefinite Integral
- Methods of Integration> Integration by Substitution
- Methods of Integration>Integration Using Trigonometric Identities
- Methods of Integration> Integration Using Partial Fraction
- Methods of Integration> Integration by Parts
- Integrals of Some Particular Functions
- Definite Integrals
- Fundamental Theorem of Integral Calculus
- Evaluation of Definite Integrals by Substitution
- Properties of Definite Integrals
- Overview of Integrals
Sets
Applications of the Integrals
Differential Equations
- Basic Concepts of Differential Equations
- Order and Degree of a Differential Equation
- General and Particular Solutions of a Differential Equation
- Methods of Solving Differential Equations> Variable Separable Differential Equations
- Methods of Solving Differential Equations> Homogeneous Differential Equations
- Methods of Solving Differential Equations>Linear Differential Equations
- Overview of Differential Equations
Vectors
- Basic Concepts of Vector Algebra
- Direction Ratios, Direction Cosine & Direction Angles in Vector
- Types of Vectors in Algebra
- Algebra of Vectors > Addition & Subtraction of Two Vectors
- Multiplication in Vector Algebra
- Components of Vector in Algebra
- Vector Joining Two Points in Algebra
- Section Formula in Vector Algebra
- Product of Two Vectors > Scalar (Dot) Product
- Overview of Vectors
Three - Dimensional Geometry
Linear Programming
Probability
Introduction
In three-dimensional space, a line's position and orientation can be defined using vectors and coordinates. A line in 3D space is uniquely determined in one of two ways: either it passes through a specific given point and heads in a specific direction, or it passes through two given points.
Equation of a Line in Space
To find the equation of a line passing through a given point and parallel to a given direction vector, we use two main forms:
-
Vector Form: Let the line pass through a point with position vector \[\vec{a}\] and be parallel to a vector \[\vec{b}\]. If \[\vec{r}\] is the position vector of any arbitrary point on the line, the vector equation is:
\[\vec{r} = \vec{a} + \lambda\vec{b}\] -
Cartesian Form:
If the line passes through a point \[A(x_1, y_1, z_1)\] and has a direction vector with direction ratios a, b, c, the Cartesian equation is:
\[\frac{x - x_1}{a} = \frac{y - y_1}{b} = \frac{z - z_1}{c}\]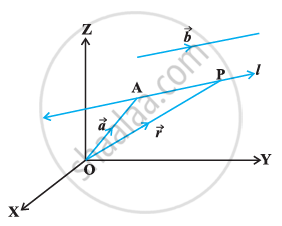
Example 1
Question: Find the vector and Cartesian equations of the line passing through the point (5, 2, -4) and parallel to the vector \[3\hat{i} + 2\hat{j} - 8\hat{k}\].
Solution:
- Vector Equation: We know \[\vec{a} = 5\hat{i} + 2\hat{j} - 4\hat{k}\] and \[\vec{b} = 3\hat{i} + 2\hat{j} - 8\hat{k}\].
Plugging this into \[\vec{r} = \vec{a} + \lambda\vec{b}\], we get:
-
Cartesian Equation: The point is \[(x_1, y_1, z_1) = (5, 2, -4)\] and the direction ratios are a = 3, b = 2, c = -8.
Plugging this into the formula gives:
\[\frac{x - 5}{3} = \frac{y - 2}{2} = \frac{z + 4}{-8}\]
Key Points: Equation of a Line in Space
-
Through point \(\vec a\) and parallel to \(\vec b\): \(\vec r = \vec a + \lambda \vec b\).
-
Parametric form: \(x = x_1 + \lambda a,; y = y_1 + \lambda b,; z = z_1 + \lambda c\).
-
Cartesian form: \(\frac{x-x_1}{a} = \frac{y-y_1}{b} = \frac{z-z_1}{c}\).
-
Through two points: \(\vec r = \vec a + \lambda(\vec b-\vec a)\).
