Topics
Mathematics
Relations and Functions
Inverse Trigonometric Functions
- Properties of Inverse Trigonometric Functions > Reciprocal Property
- Properties of Inverse Trigonometric Functions > Negative Argument Property
- Properties of Inverse Trigonometric Functions > Complementary Property
- Properties of Inverse Trigonometric Functions > Conversion Property
- Properties of Inverse Trigonometric Functions > Addition & Subtraction Formula for Inverse Tangent
- Properties of Inverse Trigonometric Functions > Double-angle Property
- Properties of Inverse Trigonometric Functions > Triple-angle Property
- Properties of Inverse Trigonometric Functions > Addition–Subtraction Formula for Inverse Sine & Cosine
- Properties of Inverse Trigonometric Functions > Self-adjusting Property
Applied Mathematics
Matrices
- Concept of Matrices
- Types of Matrices
- Equality of Matrices
- Operations on Matrices>Scalar Multiplication
- Operations on Matrices> Addition and Subtraction of Matrices
- Operations on Matrices>Scalar Multiplication
- Operations on Matrices> Matrix Multiplication
- Operations on Matrices> Addition and Subtraction of Matrices
- Transpose of a Matrix
- Symmetric and Skew Symmetric Matrices
- Symmetric and Skew Symmetric Matrices
- Invertible Matrices
Determinants
- Determinant Method (Cramer’s Rule)
- Concept of Determinant
- Concept of Determinant
- Properties of Determinants
- Application of Determinants to Coordinate Geometry
- Application of Determinants to Coordinate Geometry
- Minors and Co-factors
- Adjoint of a Matrix
- Operations on Matrices> Matrix Multiplication
- Application of Determinants to Coordinate Geometry
Continuity and Differentiability
- Concept of Differentiability
- Continuous and Discontinuous Functions
- Algebra of Continuous Functions
- Concept of Differentiability
- Derivatives of Composite Functions
- Derivative of Implicit Functions
- Derivative of Inverse Function
- Exponential and Logarithmic Functions
- Logarithmic Differentiation
- Derivatives of Functions in Parametric Forms
- Second Order Derivative
- Mean Value Theorem
Applications of Derivatives
Integrals
- Introduction of Integrals
- Integration as an Inverse Process of Differentiation
- Geometrical Interpretation of Indefinite Integrals
- Properties of Indefinite Integral
- Comparison Between Differentiation and Integration
- Methods of Integration> Integration by Substitution
- Methods of Integration> Integration Using Partial Fraction
- Integrals of Some Particular Functions
- Methods of Integration> Integration by Parts
- Methods of Integration>Integration Using Trigonometric Identities
- Definite Integrals
- Definite Integral as the Limit of a Sum
- Fundamental Theorem of Integral Calculus
- Evaluation of Definite Integrals by Substitution
- Properties of Definite Integrals
Applications of the Integrals
- Introduction of Applications of the Integrals
- Area Under Simple Curves
- Area Bounded by Two Curves
Differential Equations
- Basic Concepts of Differential Equations
- Order and Degree of a Differential Equation
- General and Particular Solutions of a Differential Equation
- Formation of a Differential Equation Whose General Solution is Given
- Procedure to Form a Differential Equation that Will Represent a Given Family of Curves
- Methods of Solving First Order, First Degree Differential Equations
- Methods of Solving Differential Equations> Variable Separable Differential Equations
- Methods of Solving Differential Equations> Homogeneous Differential Equations
- Methods of Solving Differential Equations>Linear Differential Equations
- Solutions of Linear Differential Equation
Vectors
- Basic Concepts of Vector Algebra
- Vector
- Vector Operations>Addition and Subtraction of Vectors
- Algebra of Vectors > Addition & Subtraction of Two Vectors
- Components of Vector in Algebra
- Vector Joining Two Points in Algebra
- Section Formula in Coordinate Geometry
- Product of Two Vectors > Scalar (Dot) Product
- Projection of a Vector on a Line
- Magnitude and Direction of a Vector
- Position Vector of a Point Dividing a Line Segment in a Given Ratio
- Scalar Triple Product
Three-dimensional Geometry
- Introduction of Three Dimensional Geometry
- Direction Cosines and Direction Ratios of a Line
- Equation of a Line in Space
- Angle Between Two Lines
- Shortest Distance Between Two Lines
- Equation of a Plane in Normal Form
- Equation of a Plane Perpendicular to a Given Vector and Passing Through a Given Point
- Equation of a Plane Passing Through Three Non Collinear Points
- Equations of Line in Different Forms
- Plane Passing Through the Intersection of Two Given Planes
- Coplanarity of Two Lines
- Angle Between Two Planes
- Distance of a Point from a Plane
- Angle Between Line and a Plane
- Vector and Cartesian Equation of a Plane
- Vector and Cartesian Equations of a Line
Linear Programming
Probability
Numbers, Quantification and Numerical Applications
- Modulo Arithmetic
- Apply Arithmetic Operations Using Modular Arithmetic Rules
- Apply the Definition of Congruence Modulo in Various Problems
- Allegation and Mixture
- Rule of Allegation to Produce a Mixture at a Given Price
- Determine the Mean Price of Amixture
- Apply Rule of Allegation
- Solve Real Life Problems Mathematically
- Boats and Streams (Entrance Exam)
- Express the Boats and Streams Problem in the Form of an Equation
- Pipes and Cisterns (Entrance Exam)
- Races and Games
- Differentiate Between Active Partner and Sleeping Partner
- Determination of Partner's Ratio
- Surface Area of a Combination of Solids
- Numerical Inequalities
Algebra
Calculus
- Second Order Derivative
- Higher Order Derivative
- Derivatives of Functions in Parametric Forms
- Derivative of Implicit Functions
- Dependent and Independent Variables
- Marginal Cost and Marginal Revenue Using Derivatives
- Maxima and Minima
Probability Distributions
Index Numbers and Time Based Data
- Index Numbers
- Test of Adequacy of Index Numbers
- Population and Sample
- Differentiate Between Population and Sample
- Representative Sample from a Population
- Parameter
- Concepts of Statistics
- Relation Between Parameter and Statistic
- Limitations of Statistics to Generalize the Estimation for Population
- Statistical Significance and Statistical Inferences
- Central Limit Theorem
- Relation Between Population, Sampling Distribution, and Sample
- Time Series Analysis
- Components of a Time Series
- Time Series Analysis for Uni-variate Data
Financial Mathematics
- Perpetuity Fund
- Sinking Fund
- Calculate Perpetuity
- Differentiate Between Sinking Fund and Saving Account
- Valuation of Bond
- Calculate Value of Bond Using present Value Approach
- Concept of EMI
- Calculation of EMI
- Fixed Instalment Method
- Interpretation Cost, Residual Value and Useful Life of an Asset
Linear Programming
Notes
The equation is `x^2 + y^2 + 2x – 4y + 4 = 0` ... (1)
represents a circle having centre at (–1, 2) and radius 1 unit.
Differentiating equation (1) with respect to x, we get
`(dy)/(dx) = (x + 1)/(2 - y)` (y ≠ 2) ...(2)
which is a differential equation. You will find later on that this equation represents the family of circles and one member of the family is the circle given in equation (1).
Let us consider the equation:
`x^2 + y^2 = r^2 `... (3)
By giving different values to r, we get different members of the family e.g. `x^2 + y^2 = 1`, `x^2 + y^2 = 4`, `x^2 + y^2 = 9` etc Fig .
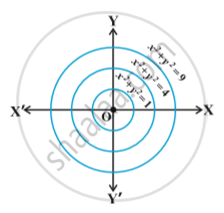
Thus, equation (3) represents a family of concentric circles centered at the origin and having different radii.
We are interested in finding a differential equation that is satisfied by each member of the family. The differential equation must be free from r because r is different for different members of the family. This equation is obtained by differentiating equation (3) with respect to x, i.e.,
2x + 2y `(dy)/(dx)` = 0 or x + y `(dy)/(dx)` =0 ...(4)
which represents the family of concentric circles given by equation (3).
