Topics
Units and Measurements
- Quantitative Science
- System of Units
- Derived Quantities and Units
- Rules and Conventions for Writing SI Units and Their Symbols
- Measurement of Length
- Measurement of Mass
- Measurement of Time
- Dimensions and Dimensional Analysis
- Accuracy, Precision and Uncertainty in Measurement
- Errors in Measurements>Systematic Errors
- Errors in Measurements>Random Errors
- Estimation of Errors
- Combination of Errors
- Significant Figures
- Definitions of SI Units and Constants
Mathematical Methods
- Vector Analysis
- Scalar
- Vector
- Vector Operations>Multiplication of a Vector by a Scalar
- Vector Operations>Addition and Subtraction of Vectors
- Vector Operations>Triangle Law for Vector Addition
- Vector Operations>Law of parallelogram of vectors
- Resolution of Vectors
- Multiplication of Vectors>Scalar Product(Dot Product)
- Multiplication of Vectors>Vector Product (Cross Product)
- Concept of Calculus
- Differential Calculus
- Integral Calculus
Motion in a Plane
- Concept of Motion
- Rectilinear Motion
- Displacement
- Path Length
- Average Velocity
- Average Speed
- Instantaneous Velocity
- Instantaneous Speed
- Acceleration in Linear Motion
- Relative Velocity
- Motion in Two Dimensions - Motion in a Plane
- Average and Instantaneous Velocities
- Acceleration in a Plane
- Equations of Motion in a Plane with Constant Acceleration
- Relative Velocity in Two Dimensions
- Projectile Motion
- Uniform Circular Motion (UCM)
- Key Parameters of Circular Motion
- Centripetal Acceleration
- Conical Pendulum
Laws of Motion
- Fundamental Principles of Motion and Mechanics
- Types of Motion
- Aristotle’s Fallacy
- Newton’s Laws of Motion
- Newton's First Law of Motion
- Newton’s Second Law of Motion
- Newton's Third Law of Motion
- Inertial and Non-inertial Frames of Reference
- Types of Forces>Fundamental Forces in Nature
- Types of Forces>Contact and Non-Contact Forces
- Types of Forces>Real and Pseudo Forces
- Types of Forces>Conservative and Non-Conservative Forces
- Types of Forces>Work Done by a Variable Force
- Work Energy Theorem
- Principle of Conservation of Linear Momentum
- Collisions
- Elastic and Inelastic Collisions
- Perfectly Inelastic Collision
- Coefficient of Restitution e
- Expressions for Final Velocities in Elastic Head-On Collision
- Loss of Kinetic Energy in Perfectly Inelastic Head-On Collision
- Collision in Two Dimensions
- Impulse of a Force
- Necessity of Defining Impulse
- Rotational Analogue of a Force: Moment of a Force Or Torque
- Couple and Its Torque
- Proof of Independence of the Axis of Rotation
- Mechanical Equilibrium
- States of Equilibrium
- Centre of Mass>Mathematical Understanding of Centre of Mass
- Centre of Mass>Velocity of Centre of Mass
- Centre of Mass>Acceleration of Centre of Mass
- Centre of Mass>Characteristics of Centre of Mass
- Centre of Gravity
Gravitation
- Concept of Gravitation
- Kepler’s Laws
- Law of Orbit or Kepler's First Law
- Law of Areas or Kepler's Second Law
- Law of Periods or Kepler's Third Law
- Newton's Universal Law of Gravitation
- Measurement of the Gravitational Constant (G)
- Acceleration Due to Gravity (Earth’s Gravitational Acceleration)
- Variation in the Acceleration>Variation in Gravity with Altitude
- Variation in the Acceleration>Variation in Gravity with Depth
- Variation in the Acceleration>Variation in Gravity with Latitude and Rotation of the Earth
- Variation in the Acceleration>Effect of the Shape of the Earth
- Gravitational Potential Energy
- Expression for Gravitational Potential Energy
- Connection of Potential Energy Formula with mgh
- Potential Difference
- Escape Velocity
- Earth Satellites
- Projection of Satellite
- Weightlessness in a Satellite
- Time Period of Satellite
- Binding Energy of an Orbiting Satellite
Mechanical Properties of Solids
- Understanding Mechanical Properties of Solids
- Elastic Behavior of Solids
- Stress and Strain
- Types of Stress and Corresponding Strain
- Hooke’s Law
- Elastic Modulus>Young’s Modulus
- Elastic Modulus>Bulk Modulus
- Elastic Modulus>Shear Modulus (Modulus of Rigidity)
- Elastic Modulus>Poisson’s Ratio
- Stress-strain Curve
- Strain Energy
- Hardness of Material
- Friction in Solids
- Origin of Friction
- Types of Friction>Static Friction
- Types of Friction>Kinetic Friction
- Types of Friction>Rolling Friction
Thermal Properties of Matter
- Understanding Thermal Properties of Matter
- Temperature and Heat
- Measurement of Temperature
- Absolute Zero and Absolute Temperature
- Ideal Gas Equation
- Thermal Expansion
- Linear Expansion
- Areal Expansion
- Volume Expansion
- Specific Heat Capacity of Solids and Liquids
- Relation Between Coefficient of Expansion
- Specific Heat Capacity of Gas
- Heat Equation
- Thermal Capacity
- Calorimetry
- Change of State
- Analysis of Observation>From Point A to B
- Analysis of Observation>From Point B to D
- Evaporation vs Boiling
- Boiling Point and Pressure
- Sublimation
- Phase Diagram
- Gas and Vapour
- Latent Heat
- Heat Transfer
- Conduction
- Thermal Conductivity
- Coefficient of Thermal Conductivity
- Thermal Resistance
- Applications of Thermal conductivity
- Convection
- Application of Convection
- Free and Forced Convection
- Radiation
- Newton’s Law of Cooling
Sound
- Sound Waves
- Common Properties of All Waves
- Transverse Waves
- Longitudinal Waves
- Mathematical Expression of a Wave
- The Speed of Travelling Waves
- The Speed of Transverse Waves
- The Speed of Longitudinal Waves
- Newton's Formula for Velocity of Sound
- Laplace’s Correction
- Factors Affecting Speed of Sound
- Principle of Superposition of Waves
- Echo
- Reverberation
- Acoustics
- Qualities of Sound
- Doppler Effect
- Source Moving and Listener Stationary
- Listener Approaching a Stationary Source with Velocity
- Both Source and Listener are Moving
- Common Properties between Doppler Effect of Sound and Light
- Major Differences between Doppler Effects of Sound and Light
Optics
- Fundamental Concepts of Light
- Nature of Light
- Ray Optics Or Geometrical Optics
- Cartesian Sign Convention
- Reflection>Reflection from a Plane Surface
- Reflection>Reflection from Curved Mirrors
- Total Internal Reflection
- Refraction of Light
- Applications of Total Internal Reflection
- Refraction at a Spherical Surface and Lenses
- Thin Lenses and Their Combination
- Refraction at a Single Spherical Surface
- Lens Makers' Equation
- Dispersion of Light
- Analysis of Prism
- Thin Prisms
- Some Natural Phenomena Due to Sunlight
- Defects of Lenses
- Optical Instruments
- Simple Microscope or a Reading Glass
- Compound Microscope
- Telescope
Electrostatics
- Concept of Electrostatics
- Electric Charge
- Basic Properties of Electric Charge
- Additive Nature of Charge
- Quantization of Charge
- Conservation of Charge
- Force between Charges
- Coulomb’s Law
- Coulomb's Law (Scalar Form): Force Between Two Point-Charges
- Relative Permittivity or Dielectric Constant
- Definition of Unit Charge from the Coulomb’s Law
- Coulomb's Law in Vector Form
- Forces Between Multiple Charges: Superposition Principle
- Electric Field
- Electric Field Intensity Due to a Point-Charge
- Practical Way of Calculating Electric Field
- Electric Lines of Force
- Electric Flux
- Gauss’s Law
- Electric Dipole
- Couple Acting on an Electric Dipole in a Uniform Electric Field
- Electric Intensity at a Point Due to an Electric Dipole
- Continuous Charge Distribution
Electric Current Through Conductors
- Electric Current and Its Related Concepts
- Electric Current
- Flow of Current Through a Conductor
- Drift Speed
- Ohm's Law
- Limitations of Ohm’s Law
- Electrical Power
- Resistors
- Rheostat
- Resistors in Parallel
- Specific Resistance or Electrical Resistivity
- Variation of Resistance with Temperature
- Electromotive Force of a Cell
- Cells in Series
- Cells in Parallel
- Types of Cells
Magnetism
- Concept of Magnetism
- Magnetic Lines of Force
- Bar Magnet and Solenoid Analogy
- Magnetic Field due to a Bar Magnet
- Magnetic Field Due to a Bar Magnet at an Arbitrary Point
- Gauss' Law of Magnetism
- The Earth’s Magnetism
Electromagnetic Waves and Communication System
- Foundations of Electromagnetic Theory
- Concept of Electromagnetic Waves
- Concept of Electromagnetic Waves
- Characteristics of EM Waves
- Electromagnetic Spectrum
- Radio Waves
- Microwaves
- Infrared waves
- Visible Light
- Ultraviolet rays
- X-rays
- Gamma Rays
- Propagation of EM Waves
- Ground (surface) Wave
- Space wave
- Sky wave propagation
- Communication System
- Elements of a Communication System
- Commonly Used Terms in Electronic Communication System
- Modulation
Semiconductors
- Concept of Semiconductors
- Electrical Conduction in Solids
- Band Theory of Solids
- Intrinsic Semiconductor
- Extrinsic Semiconductor
- n-type Semiconductor
- p-type Semiconductor
- Charge neutrality of extrinsic semiconductors
- Diode or p-n Junction
- Basics of Semiconductor Devices
- Applications of Semiconductors and P-n Junction Diode
- Thermistor
Definition: Vector Product
The Vector Product (or Cross Product) is a method of multiplying two vectors (\[\vec P\] and \[\vec Q\]) that results in a new vector (\[\vec R\]). This new vector is fundamentally related to the rotation or perpendicular effects created by the two original vectors.
The magnitude of the resulting vector R is defined by the product of the magnitudes of the two vectors and the sine of the smaller angle (θ) between them.
Magnitude: ∣R∣ = ∣ P × Q ∣ = PQ sin θ
Formula: Vector (Cross) Product
\[\vec{A}\times\vec{B}=AB\sin\theta\hat{n}\]
Core Properties and Characteristics
| Property | Rule | Implication / Key Insight |
| Non-Commutative | \[\vec{P} \times \vec{Q} \ne \vec{Q} \times \vec{P}\] | The direction reverses when the order is swapped. This is the only law not obeyed. |
| Anti-Commutative | \[\vec{P} \times \vec{Q} = -(\vec{Q} \times \vec{P})\] | The magnitudes are equal |
| Distributive | \[\vec{A} \times (\vec{B} + \vec{C}) = \vec{A} \times \vec{B} + \vec{A} \times \vec{C}\] | The cross product can be distributed over vector addition. |
Special Cases (Angle θ)
| Angle θ | Condition | sinθ | Physical Insight |
| 0° (Parallel) | \[\vec{P} \parallel \vec{Q}\] | 0 | \[\vec R\] |
| 180° (Anti-Parallel) | \[\vec{P} \uparrow\downarrow \vec{Q}\] | 0 | \[\vec R\] |
| 90° (Perpendicular) | \[\vec{P} \perp \vec{Q}\] | 1 | \[\vec R\] |
Steps for Calculating the Cross Product
- Write both vectors with their i, j, k components (e.g. \[\mathbf{P}=P_x\hat{i}+P_y\hat{j}+P_z\hat{k}\]).
- Set up the cross product as a determinant using the components.
- Multiply as per the determinant formula:
\[\mathbf{P}\times\mathbf{Q}=(P_yQ_z-P_zQ_y)\hat{i}+(P_zQ_x-P_xQ_z)\hat{j}+(P_xQ_y-P_yQ_x)\hat{k}\] - Apply the right-hand rule to find the direction.
- Check for special cases like parallelism (result zero), perpendicular vectors (maximum result), or swapping order (direction reverses).
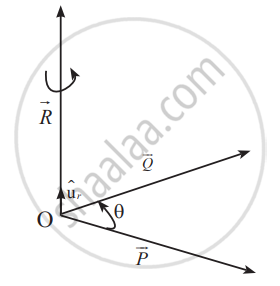
Fig. 2.10 (a): Vector product \[\vec R\] = \[\vec P\] × \[\vec Q\].
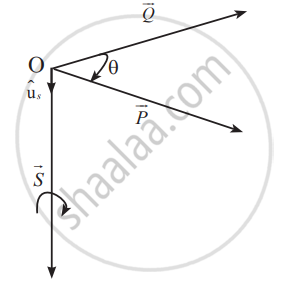
Fig. 2.10 (b): Vector product \[\vec S\] = \[\vec Q\] × \[\vec P\] .
Significance
- Used to calculate rotation and perpendicular effects in physics.
- Important for finding the torque and the magnetic force direction.
- Useful in 3D geometry, engineering, and vector analysis.
- Helps describe the angular velocity or velocity of rotating bodies.
- The cross product’s properties help distinguish physical laws (like non-commutativity).
Example 1
Compute \[\vec L\] = \[\vec r\] × \[\vec p\].
L = \[\begin{vmatrix}
\hat{i} & \hat{j} & \hat{k} \\
4 & 6 & -3 \\
2 & 4 & -5
\end{vmatrix}\]
Simplify:
- i-component: (ry × pz) − (rz × py) = (6 × (−5)) − ((−3) × 4) = -18\[\hat i\]
- j-component: (rz × px) − (rx × pz) = ((−3) × 2) − (4 × (−5)) = +14\[\hat j\]
- k-component: (rx × py) − (ry × px) = (4 × 4) − (6 × 2) = +4\[\hat k\]
\[\vec L\] = -18\[\hat i\] + 14\[\hat j\] + 4 \[\hat k\]
Example 2
Given A = \[5\hat{i}+6\hat{j}+4\hat{k}\], B = \[2\hat{i}-2\hat{j}+3\hat{k}\]. Find the angle between A and B:
- Compute dot product: A⋅B = 10.
- Compute magnitudes: ∣A∣ = \[\sqrt {77}\], ∣B∣ = \[\sqrt {17}\].
- Calculate cos θ = \[\frac{10}{\sqrt{77}\sqrt{17}}\] ≈ 0.2764.
- Find θ: θ = cos−1(0.2764) ≈ 73∘58′.
Example 3
Given \[\vec P\] = \[4\hat{i}-\hat{j}+8\hat{k}\], \[\vec Q\] = \[2\hat{i}-m\hat{j}+4\hat{k}.\]
Find: The value of m such that \[\vec P\] and \[\vec Q\] have the same direction
- For vectors to have the same direction, their components are proportional.
\[\frac{P_x}{Q_x}=\frac{P_y}{Q_y}=\frac{P_z}{Q_z}.\] - So \[\frac {4}{2}\] = \[\frac {-1}{-m}\] = \[\frac {8}{4}\] = 2.
From \[\frac {-1}{-m}\] = 2 gives \[\frac {1}{m}\] = 2 ⇒ m = \[\frac {1}{2}\].
Thus m = \[\frac {1}{2}\].
Real Life Applications
The cross product is essential for describing motion and forces involving rotation:
- Torque: Bolts turn using a force and a handle, calculated as the cross product.
- Magnetic Force: Moving charges in magnetic fields experience a force direction described by the cross product.
- Rotating Fan Blade: The speed and direction of points on the blade use the cross product for velocity.
