Topics
Units and Measurements
- Quantitative Science
- System of Units
- Derived Quantities and Units
- Rules and Conventions for Writing SI Units and Their Symbols
- Measurement of Length
- Measurement of Mass
- Measurement of Time
- Dimensions and Dimensional Analysis
- Accuracy, Precision and Uncertainty in Measurement
- Errors in Measurements>Systematic Errors
- Errors in Measurements>Random Errors
- Estimation of Errors
- Combination of Errors
- Significant Figures
- Definitions of SI Units and Constants
Mathematical Methods
- Vector Analysis
- Scalar
- Vector
- Vector Operations>Multiplication of a Vector by a Scalar
- Vector Operations>Addition and Subtraction of Vectors
- Vector Operations>Triangle Law for Vector Addition
- Vector Operations>Law of parallelogram of vectors
- Resolution of Vectors
- Multiplication of Vectors>Scalar Product(Dot Product)
- Multiplication of Vectors>Vector Product (Cross Product)
- Concept of Calculus
- Differential Calculus
- Integral Calculus
Motion in a Plane
- Concept of Motion
- Rectilinear Motion
- Displacement
- Path Length
- Average Velocity
- Average Speed
- Instantaneous Velocity
- Instantaneous Speed
- Acceleration in Linear Motion
- Relative Velocity
- Motion in Two Dimensions - Motion in a Plane
- Average and Instantaneous Velocities
- Acceleration in a Plane
- Equations of Motion in a Plane with Constant Acceleration
- Relative Velocity in Two Dimensions
- Projectile Motion
- Uniform Circular Motion (UCM)
- Key Parameters of Circular Motion
- Centripetal Acceleration
- Conical Pendulum
Laws of Motion
- Fundamental Principles of Motion and Mechanics
- Types of Motion
- Aristotle’s Fallacy
- Newton’s Laws of Motion
- Newton's First Law of Motion
- Newton’s Second Law of Motion
- Newton's Third Law of Motion
- Inertial and Non-inertial Frames of Reference
- Types of Forces>Fundamental Forces in Nature
- Types of Forces>Contact and Non-Contact Forces
- Types of Forces>Real and Pseudo Forces
- Types of Forces>Conservative and Non-Conservative Forces
- Types of Forces>Work Done by a Variable Force
- Work Energy Theorem
- Principle of Conservation of Linear Momentum
- Collisions
- Elastic and Inelastic Collisions
- Perfectly Inelastic Collision
- Coefficient of Restitution e
- Expressions for Final Velocities in Elastic Head-On Collision
- Loss of Kinetic Energy in Perfectly Inelastic Head-On Collision
- Collision in Two Dimensions
- Impulse of a Force
- Necessity of Defining Impulse
- Rotational Analogue of a Force: Moment of a Force Or Torque
- Couple and Its Torque
- Proof of Independence of the Axis of Rotation
- Mechanical Equilibrium
- States of Equilibrium
- Centre of Mass>Mathematical Understanding of Centre of Mass
- Centre of Mass>Velocity of Centre of Mass
- Centre of Mass>Acceleration of Centre of Mass
- Centre of Mass>Characteristics of Centre of Mass
- Centre of Gravity
Gravitation
- Concept of Gravitation
- Kepler’s Laws
- Law of Orbit or Kepler's First Law
- Law of Areas or Kepler's Second Law
- Law of Periods or Kepler's Third Law
- Newton's Universal Law of Gravitation
- Measurement of the Gravitational Constant (G)
- Acceleration Due to Gravity (Earth’s Gravitational Acceleration)
- Variation in the Acceleration>Variation in Gravity with Altitude
- Variation in the Acceleration>Variation in Gravity with Depth
- Variation in the Acceleration>Variation in Gravity with Latitude and Rotation of the Earth
- Variation in the Acceleration>Effect of the Shape of the Earth
- Gravitational Potential Energy
- Expression for Gravitational Potential Energy
- Connection of Potential Energy Formula with mgh
- Potential Difference
- Escape Velocity
- Earth Satellites
- Projection of Satellite
- Weightlessness in a Satellite
- Time Period of Satellite
- Binding Energy of an Orbiting Satellite
Mechanical Properties of Solids
- Understanding Mechanical Properties of Solids
- Elastic Behavior of Solids
- Stress and Strain
- Types of Stress and Corresponding Strain
- Hooke’s Law
- Elastic Modulus>Young’s Modulus
- Elastic Modulus>Bulk Modulus
- Elastic Modulus>Shear Modulus (Modulus of Rigidity)
- Elastic Modulus>Poisson’s Ratio
- Stress-strain Curve
- Strain Energy
- Hardness of Material
- Friction in Solids
- Origin of Friction
- Types of Friction>Static Friction
- Types of Friction>Kinetic Friction
- Types of Friction>Rolling Friction
Thermal Properties of Matter
- Understanding Thermal Properties of Matter
- Temperature and Heat
- Measurement of Temperature
- Absolute Zero and Absolute Temperature
- Ideal Gas Equation
- Thermal Expansion
- Linear Expansion
- Areal Expansion
- Volume Expansion
- Specific Heat Capacity of Solids and Liquids
- Relation Between Coefficient of Expansion
- Specific Heat Capacity of Gas
- Heat Equation
- Thermal Capacity
- Calorimetry
- Change of State
- Analysis of Observation>From Point A to B
- Analysis of Observation>From Point B to D
- Evaporation vs Boiling
- Boiling Point and Pressure
- Sublimation
- Phase Diagram
- Gas and Vapour
- Latent Heat
- Heat Transfer
- Conduction
- Thermal Conductivity
- Coefficient of Thermal Conductivity
- Thermal Resistance
- Applications of Thermal conductivity
- Convection
- Application of Convection
- Free and Forced Convection
- Radiation
- Newton’s Law of Cooling
Sound
- Sound Waves
- Common Properties of All Waves
- Transverse Waves
- Longitudinal Waves
- Mathematical Expression of a Wave
- The Speed of Travelling Waves
- The Speed of Transverse Waves
- The Speed of Longitudinal Waves
- Newton's Formula for Velocity of Sound
- Laplace’s Correction
- Factors Affecting Speed of Sound
- Principle of Superposition of Waves
- Echo
- Reverberation
- Acoustics
- Qualities of Sound
- Doppler Effect
- Source Moving and Listener Stationary
- Listener Approaching a Stationary Source with Velocity
- Both Source and Listener are Moving
- Common Properties between Doppler Effect of Sound and Light
- Major Differences between Doppler Effects of Sound and Light
Optics
- Fundamental Concepts of Light
- Nature of Light
- Ray Optics Or Geometrical Optics
- Cartesian Sign Convention
- Reflection>Reflection from a Plane Surface
- Reflection>Reflection from Curved Mirrors
- Total Internal Reflection
- Refraction of Light
- Applications of Total Internal Reflection
- Refraction at a Spherical Surface and Lenses
- Thin Lenses and Their Combination
- Refraction at a Single Spherical Surface
- Lens Makers' Equation
- Dispersion of Light
- Analysis of Prism
- Thin Prisms
- Some Natural Phenomena Due to Sunlight
- Defects of Lenses
- Optical Instruments
- Simple Microscope or a Reading Glass
- Compound Microscope
- Telescope
Electrostatics
- Concept of Electrostatics
- Electric Charge
- Basic Properties of Electric Charge
- Additive Nature of Charge
- Quantization of Charge
- Conservation of Charge
- Force between Charges
- Coulomb’s Law
- Coulomb's Law (Scalar Form): Force Between Two Point-Charges
- Relative Permittivity or Dielectric Constant
- Definition of Unit Charge from the Coulomb’s Law
- Coulomb's Law in Vector Form
- Forces Between Multiple Charges: Superposition Principle
- Electric Field
- Electric Field Intensity Due to a Point-Charge
- Practical Way of Calculating Electric Field
- Electric Lines of Force
- Electric Flux
- Gauss’s Law
- Electric Dipole
- Couple Acting on an Electric Dipole in a Uniform Electric Field
- Electric Intensity at a Point Due to an Electric Dipole
- Continuous Charge Distribution
Electric Current Through Conductors
- Electric Current and Its Related Concepts
- Electric Current
- Flow of Current Through a Conductor
- Drift Speed
- Ohm's Law
- Limitations of Ohm’s Law
- Electrical Power
- Resistors
- Rheostat
- Resistors in Parallel
- Specific Resistance or Electrical Resistivity
- Variation of Resistance with Temperature
- Electromotive Force of a Cell
- Cells in Series
- Cells in Parallel
- Types of Cells
Magnetism
- Concept of Magnetism
- Magnetic Lines of Force
- Bar Magnet and Solenoid Analogy
- Magnetic Field due to a Bar Magnet
- Magnetic Field Due to a Bar Magnet at an Arbitrary Point
- Gauss' Law of Magnetism
- The Earth’s Magnetism
Electromagnetic Waves and Communication System
- Foundations of Electromagnetic Theory
- Concept of Electromagnetic Waves
- Concept of Electromagnetic Waves
- Characteristics of EM Waves
- Electromagnetic Spectrum
- Radio Waves
- Microwaves
- Infrared waves
- Visible Light
- Ultraviolet rays
- X-rays
- Gamma Rays
- Propagation of EM Waves
- Ground (surface) Wave
- Space wave
- Sky wave propagation
- Communication System
- Elements of a Communication System
- Commonly Used Terms in Electronic Communication System
- Modulation
Semiconductors
- Concept of Semiconductors
- Electrical Conduction in Solids
- Band Theory of Solids
- Intrinsic Semiconductor
- Extrinsic Semiconductor
- n-type Semiconductor
- p-type Semiconductor
- Charge neutrality of extrinsic semiconductors
- Diode or p-n Junction
- Basics of Semiconductor Devices
- Applications of Semiconductors and P-n Junction Diode
- Thermistor
Introduction
Newton's laws of motion are designed for point masses, but in real life, all objects have measurable sizes. The concept of centre of mass helps us treat these finite-sized objects as if they were point objects located at a specific position. This makes it possible to apply Newton's laws to real objects. The centre of mass is a very important concept in physics that simplifies the study of the motion of extended bodies.
Maharashtra State Board: Class 11
Definition: Centre of Mass
"The centre of mass is a point about which the summation of moments of masses in the system is zero."
OR
A point at which the total mass (MM) of a finite body is supposed to be concentrated, and about which the summation of moments of masses in the system is zero, is called the centre of mass.
OR
The centre of mass is a hypothetical point at which the entire mass of the body can be assumed to be concentrated.
Formula: Centre of Mass
i. For n particle system,
Position vector \[\vec r_{C.M.}\] = \[\frac{\sum_{i}^{n}m_{i}\overset{\to}{\operatorname*{r_{i}}}}{\sum_{i}^{n}m_{i}}=\frac{\sum_{i}^{n}m_{i}\overset{\to}{\operatorname*{r_{i}}}}{M}\]
ii. For continuous distribution,
Positive Vector \[\vec r_{C.M}\] = \[\frac {\int{\vec r}\mathrm dm}{M}\]
System of n Particles
When we have n particles with masses m1, m2, ..., mn, the total mass is:
M = \[\sum_{i=1}^nm_i\]
If these particles are located at position vectors \[\vec{r}_1,\vec{r}_2,...,\vec{r}_n\] from origin O, then the position vector \[\vec r\] of their centre of mass is:
\[\vec{r}=\frac{\sum_{i=1}^nm_i\vec{r}_i}{\sum_{i=1}^nm_i}=\frac{\sum_{i=1}^nm_i\vec{r}_i}{M}\]
Special Case: If the origin is at the centre of mass, then \[\vec r\] = and \[\sum_{i=1}^nm_i\vec{r}_i\] = 0
For Cartesian Coordinates:
The x-coordinate of the centre of mass:
x = \[\frac{\sum_{i=1}^nm_ix_i}{M}\]
The y-coordinate of the centre of mass:
y = \[\frac{\sum_{i=1}^nm_iy_i}{M}\]
The z-coordinate of centre of mass:
z = \[\frac{\sum_{i=1}^nm_iz_i}{M}\]
Continuous Mass Distribution
For objects with continuous mass distribution and uniform density, we use integration instead of summation:
\[\vec{r}=\frac{\int\vec{r}dm}{\int dm}=\frac{\int\vec{r}dm}{M}\]
where M = ∫ dm is the total mass.
Cartesian coordinates become:
x = \[\frac{\int xdm}{M}\]
y = \[\frac{\int ydm}{M}\]
z = \[\frac{\int zdm}{M}\]
Important Results for Symmetric Objects
- For two point masses: Centre of mass divides the distance in inverse proportion to the masses
- For geometrically symmetric objects with uniform density, the Centre of mass is at the geometrical centre
Some standard results:
- Isosceles triangular plate: \[x_c=0,y_c=\frac{H}{3}\]
- Right angled triangular plate: \[x_c=\frac{P}{3},y_c=\frac{q}{3}\]
- Thin semicircular ring (radius R): \[x_c=0,y_c=\frac{2R}{\pi}\]
- Thin semicircular disc (radius R): \[x_c=0,y_c=\frac{4R}{3\pi}\]
- Hemispherical shell (radius R): \[x_c=0,y_c=\frac{R}{2}\]
- Solid hemisphere (radius R): \[x_c=0,y_c=\frac{3R}{8}\]
- Hollow right circular cone (height h): \[x_c=0,y_c=\frac{h}{3}\]
- Solid right circular cone (height h): \[x_c=0,y_c=\frac{h}{4}\]
Significance
- Allows us to apply Newton's laws to real extended objects by treating them as point masses
- Simplifies complex calculations for objects with many particles
- Helps predict the motion of rigid bodies and systems
- Essential for understanding rotational motion and stability
- Makes it easier to analyze collisions and the momentum of extended bodies
- Used in engineering and design to ensure balance and stability
Example 1
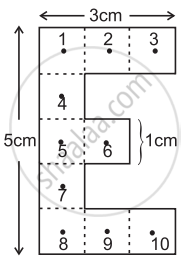
Problem: Find the centre of mass of a uniform cardboard shaped like the letter 'E' made of 10 equal squares.
Solution Steps:
1. Treat each square as mass m at its center (numbered 1 to 10
2. Choose origin at central left mass (m₅)
3. Use symmetry:
- Masses m₁, m₂, m₃ combine to an effective 3m at position (1, 2)
- Masses m₈, m₉, m₁₀ combine to an effective 3m at position (1, -2)
- These two groups combine to 6m at position (1, 0)
- Mass m₆ is also at (1, 0), so a total of 7m at (1, 0)
- Masses m₄, m₅, m₇ give an effective 3m at the origin (0, 0)
4. Now we have two point masses: 3m at (0,0) and 7m at (1,0)
5. Calculate x-coordinate:
\[x_c=\frac{3\times0+7\times1}{3+7}=\frac{7}{10}=0.7\mathrm{cm}\]
Answer: Centre of mass is at 0.7 cm from the origin along the x-axis
Example 2
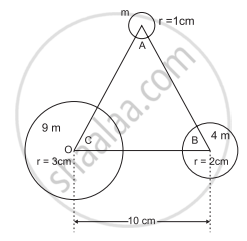
Problem: Three hollow spheres of radii 1 cm, 2 cm, and 3 cm are at vertices of an equilateral triangle ABC (side 10 cm). Find the centre of mass.
Solution Steps:
1. Mass is proportional to surface area (proportional to r²)
-
If mass at A = m, then mass at B = 4m, mass at C = 9m
2. Choose origin at C (largest mass) and B on the positive x-axis
- C coordinates: (0, 0)
- B coordinates: (10, 0)
- A coordinates: (5, \[\frac{10\sqrt{3}}{2}\])
3. Calculate x-coordinate:
\[x_c=\frac{m\times5+4m\times10+9m\times0}{m+4m+9m}=\frac{45m}{14m}=\frac{45}{14}\mathrm{cm}\]
4. Calculate y-coordinate:
\[y_c=\frac{m\times\frac{10\sqrt{3}}{2}+4m\times0+9m\times0}{14m}=\frac{10\sqrt{3}}{28}\mathrm{cm}\]
Answer: Centre of mass is at (\[\frac{45}{14},\frac{10\sqrt{3}}{28}\]) cm from origin at C
Example 3
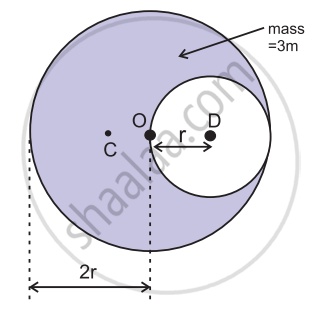
Problem: A hole of radius r is cut from a uniform disc of radius 2r. The centre of the hole is at a distance r from the disc centre. Find the centre of mass of the remaining part.
Solution Steps:
Method I - Using Entire Disc:
1. Original disc has centre of mass at its centre O (our origin)
2. Cut portion has mass m and centre at distance r from O
3. Remaining portion has mass = 4m - m = 3m (since area ratio is 4:1)
4. Use the centre of mass formula for a full disc:
0 = \[\frac{m\times r+3m\times x}{m+3m}\]
5. Solve for x: 0 = mr+3mx
x = \[-\frac{r}{3}\]
Method II - Using Negative Mass Concept:
Use formula: \[\vec{r}_{c}=\frac{M\vec{R}-m\vec{r}}{M-m}\]
With M = 4m, m = m, R = 0, r = r:
\[r_c=\frac{0-m\times r}{4m-m}=\frac{-mr}{3m}=-\frac{r}{3}\]
Answer: Centre of mass is at distance \[\frac {r}{3}\] from disc centre, on opposite side of the hole
Real-Life Examples
- Seesaw Balance: A heavier child sits closer to the pivot to balance a lighter one further out.
- High Jump: Jumpers arch their body so the center of mass stays lower, helping them clear the bar.
- Car Stability: Cars have a low center of mass to avoid tipping on turns.
- Rocket Flight: Rocket stability depends on how the center of mass shifts as fuel burns.
- Tightrope Walk: Walkers use a long pole to lower their center of mass and stay balanced.
- Phone Balance: A phone balances on your finger when your finger is under its center of mass.
