Topics
Units and Measurements
- Quantitative Science
- System of Units
- Derived Quantities and Units
- Rules and Conventions for Writing SI Units and Their Symbols
- Measurement of Length
- Measurement of Mass
- Measurement of Time
- Dimensions and Dimensional Analysis
- Accuracy, Precision and Uncertainty in Measurement
- Errors in Measurements>Systematic Errors
- Errors in Measurements>Random Errors
- Estimation of Errors
- Combination of Errors
- Significant Figures
- Definitions of SI Units and Constants
Mathematical Methods
- Vector Analysis
- Scalar
- Vector
- Vector Operations>Multiplication of a Vector by a Scalar
- Vector Operations>Addition and Subtraction of Vectors
- Vector Operations>Triangle Law for Vector Addition
- Vector Operations>Law of parallelogram of vectors
- Resolution of Vectors
- Multiplication of Vectors>Scalar Product(Dot Product)
- Multiplication of Vectors>Vector Product (Cross Product)
- Concept of Calculus
- Differential Calculus
- Integral Calculus
Motion in a Plane
- Concept of Motion
- Rectilinear Motion
- Displacement
- Path Length
- Average Velocity
- Average Speed
- Instantaneous Velocity
- Instantaneous Speed
- Acceleration in Linear Motion
- Relative Velocity
- Motion in Two Dimensions - Motion in a Plane
- Average and Instantaneous Velocities
- Acceleration in a Plane
- Equations of Motion in a Plane with Constant Acceleration
- Relative Velocity in Two Dimensions
- Projectile Motion
- Uniform Circular Motion (UCM)
- Key Parameters of Circular Motion
- Centripetal Acceleration
- Conical Pendulum
Laws of Motion
- Fundamental Principles of Motion and Mechanics
- Types of Motion
- Aristotle’s Fallacy
- Newton’s Laws of Motion
- Newton's First Law of Motion
- Newton’s Second Law of Motion
- Newton's Third Law of Motion
- Inertial and Non-inertial Frames of Reference
- Types of Forces>Fundamental Forces in Nature
- Types of Forces>Contact and Non-Contact Forces
- Types of Forces>Real and Pseudo Forces
- Types of Forces>Conservative and Non-Conservative Forces
- Types of Forces>Work Done by a Variable Force
- Work Energy Theorem
- Principle of Conservation of Linear Momentum
- Collisions
- Elastic and Inelastic Collisions
- Perfectly Inelastic Collision
- Coefficient of Restitution e
- Expressions for Final Velocities in Elastic Head-On Collision
- Loss of Kinetic Energy in Perfectly Inelastic Head-On Collision
- Collision in Two Dimensions
- Impulse of a Force
- Necessity of Defining Impulse
- Rotational Analogue of a Force: Moment of a Force Or Torque
- Couple and Its Torque
- Proof of Independence of the Axis of Rotation
- Mechanical Equilibrium
- States of Equilibrium
- Centre of Mass>Mathematical Understanding of Centre of Mass
- Centre of Mass>Velocity of Centre of Mass
- Centre of Mass>Acceleration of Centre of Mass
- Centre of Mass>Characteristics of Centre of Mass
- Centre of Gravity
Gravitation
- Concept of Gravitation
- Kepler’s Laws
- Law of Orbit or Kepler's First Law
- Law of Areas or Kepler's Second Law
- Law of Periods or Kepler's Third Law
- Newton's Universal Law of Gravitation
- Measurement of the Gravitational Constant (G)
- Acceleration Due to Gravity (Earth’s Gravitational Acceleration)
- Variation in the Acceleration>Variation in Gravity with Altitude
- Variation in the Acceleration>Variation in Gravity with Depth
- Variation in the Acceleration>Variation in Gravity with Latitude and Rotation of the Earth
- Variation in the Acceleration>Effect of the Shape of the Earth
- Gravitational Potential Energy
- Expression for Gravitational Potential Energy
- Connection of Potential Energy Formula with mgh
- Potential Difference
- Escape Velocity
- Earth Satellites
- Projection of Satellite
- Weightlessness in a Satellite
- Time Period of Satellite
- Binding Energy of an Orbiting Satellite
Mechanical Properties of Solids
- Understanding Mechanical Properties of Solids
- Elastic Behavior of Solids
- Stress and Strain
- Types of Stress and Corresponding Strain
- Hooke’s Law
- Elastic Modulus>Young’s Modulus
- Elastic Modulus>Bulk Modulus
- Elastic Modulus>Shear Modulus (Modulus of Rigidity)
- Elastic Modulus>Poisson’s Ratio
- Stress-strain Curve
- Strain Energy
- Hardness of Material
- Friction in Solids
- Origin of Friction
- Types of Friction>Static Friction
- Types of Friction>Kinetic Friction
- Types of Friction>Rolling Friction
Thermal Properties of Matter
- Understanding Thermal Properties of Matter
- Temperature and Heat
- Measurement of Temperature
- Absolute Zero and Absolute Temperature
- Ideal Gas Equation
- Thermal Expansion
- Linear Expansion
- Areal Expansion
- Volume Expansion
- Specific Heat Capacity of Solids and Liquids
- Relation Between Coefficient of Expansion
- Specific Heat Capacity of Gas
- Heat Equation
- Thermal Capacity
- Calorimetry
- Change of State
- Analysis of Observation>From Point A to B
- Analysis of Observation>From Point B to D
- Evaporation vs Boiling
- Boiling Point and Pressure
- Sublimation
- Phase Diagram
- Gas and Vapour
- Latent Heat
- Heat Transfer
- Conduction
- Thermal Conductivity
- Coefficient of Thermal Conductivity
- Thermal Resistance
- Applications of Thermal conductivity
- Convection
- Application of Convection
- Free and Forced Convection
- Radiation
- Newton’s Law of Cooling
Sound
- Sound Waves
- Common Properties of All Waves
- Transverse Waves
- Longitudinal Waves
- Mathematical Expression of a Wave
- The Speed of Travelling Waves
- The Speed of Transverse Waves
- The Speed of Longitudinal Waves
- Newton's Formula for Velocity of Sound
- Laplace’s Correction
- Factors Affecting Speed of Sound
- Principle of Superposition of Waves
- Echo
- Reverberation
- Acoustics
- Qualities of Sound
- Doppler Effect
- Source Moving and Listener Stationary
- Listener Approaching a Stationary Source with Velocity
- Both Source and Listener are Moving
- Common Properties between Doppler Effect of Sound and Light
- Major Differences between Doppler Effects of Sound and Light
Optics
- Fundamental Concepts of Light
- Nature of Light
- Ray Optics Or Geometrical Optics
- Cartesian Sign Convention
- Reflection>Reflection from a Plane Surface
- Reflection>Reflection from Curved Mirrors
- Total Internal Reflection
- Refraction of Light
- Applications of Total Internal Reflection
- Refraction at a Spherical Surface and Lenses
- Thin Lenses and Their Combination
- Refraction at a Single Spherical Surface
- Lens Makers' Equation
- Dispersion of Light
- Analysis of Prism
- Thin Prisms
- Some Natural Phenomena Due to Sunlight
- Defects of Lenses
- Optical Instruments
- Simple Microscope or a Reading Glass
- Compound Microscope
- Telescope
Electrostatics
- Concept of Electrostatics
- Electric Charge
- Basic Properties of Electric Charge
- Additive Nature of Charge
- Quantization of Charge
- Conservation of Charge
- Force between Charges
- Coulomb’s Law
- Coulomb's Law (Scalar Form): Force Between Two Point-Charges
- Relative Permittivity or Dielectric Constant
- Definition of Unit Charge from the Coulomb’s Law
- Coulomb's Law in Vector Form
- Forces Between Multiple Charges: Superposition Principle
- Electric Field
- Electric Field Intensity Due to a Point-Charge
- Practical Way of Calculating Electric Field
- Electric Lines of Force
- Electric Flux
- Gauss’s Law
- Electric Dipole
- Couple Acting on an Electric Dipole in a Uniform Electric Field
- Electric Intensity at a Point Due to an Electric Dipole
- Continuous Charge Distribution
Electric Current Through Conductors
- Electric Current and Its Related Concepts
- Electric Current
- Flow of Current Through a Conductor
- Drift Speed
- Ohm's Law
- Limitations of Ohm’s Law
- Electrical Power
- Resistors
- Rheostat
- Resistors in Parallel
- Specific Resistance or Electrical Resistivity
- Variation of Resistance with Temperature
- Electromotive Force of a Cell
- Cells in Series
- Cells in Parallel
- Types of Cells
Magnetism
- Concept of Magnetism
- Magnetic Lines of Force
- Bar Magnet and Solenoid Analogy
- Magnetic Field due to a Bar Magnet
- Magnetic Field Due to a Bar Magnet at an Arbitrary Point
- Gauss' Law of Magnetism
- The Earth’s Magnetism
Electromagnetic Waves and Communication System
- Foundations of Electromagnetic Theory
- Concept of Electromagnetic Waves
- Concept of Electromagnetic Waves
- Characteristics of EM Waves
- Electromagnetic Spectrum
- Radio Waves
- Microwaves
- Infrared waves
- Visible Light
- Ultraviolet rays
- X-rays
- Gamma Rays
- Propagation of EM Waves
- Ground (surface) Wave
- Space wave
- Sky wave propagation
- Communication System
- Elements of a Communication System
- Commonly Used Terms in Electronic Communication System
- Modulation
Semiconductors
- Concept of Semiconductors
- Electrical Conduction in Solids
- Band Theory of Solids
- Intrinsic Semiconductor
- Extrinsic Semiconductor
- n-type Semiconductor
- p-type Semiconductor
- Charge neutrality of extrinsic semiconductors
- Diode or p-n Junction
- Basics of Semiconductor Devices
- Applications of Semiconductors and P-n Junction Diode
- Thermistor
Introduction
- This topic introduces the Principle of Conservation of Linear Momentum, which is a fundamental concept in physics.
- It is directly based on Newton's second law of motion, which relates force to the change in momentum.
- The principle states that if there is no net force acting on a system, its total linear momentum remains unchanged.
- This concept is essential for analyzing interactions like collisions and explosions in a simplified manner.
Definition: Principle of Conservation of Linear Momentum
“The total momentum of an isolated system is conserved during any interaction.”
Definition: Free Body Diagram (FBD)
A diagram that refers to forces acting on only one body at a time, along with its acceleration, is called a Free Body Diagram (FBD).
Formula: Linear momentum
\[\vec p\] = m\[\vec v\]
Characteristics
| Feature | Description | Example |
|---|---|---|
| Resultant Force | The principle is valid when there is no resultant (net) external force acting on the system. | If (F = 0), then momentum (p) is constant. |
| Isolated System | This means the absence of any external force on the system. | A system of colliding or exploding objects. |
| System | Refers to a set of particles, colliding objects, or exploding objects. | The two masses (m1 and m2) in an Atwood machine. |
| Interaction | Refers to processes like collision or explosion. | The moment two objects collide with each other. |
| Forces in Interaction | Forces during collision or explosion are considered internal forces for the entire system. | The forces the two particles exert on each other during a collision. |
Application of Newton's Second Law and FBD
The process involves applying Newton's second law to individual bodies or systems using Free Body Diagrams (FBDs).
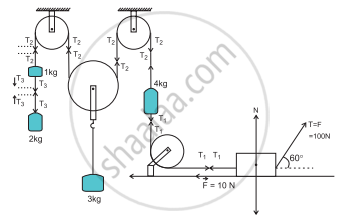
System for illustration of a free body diagram.
Steps for using Free Body Diagrams:
- Define System: Identify the specific body or a set of bodies (system) you are analyzing.
- Draw FBD: Create a Free Body Diagram, which shows all the individual forces acting on only one body at a time (and its acceleration).
- Identify Agencies: Identify all agencies exerting forces on that mass (e.g., Earth for gravity, strings for tension, contact surfaces for normal force/friction).
- Resolve Forces: Resolve forces into relevant perpendicular components (e.g., horizontal and vertical).
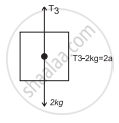
Free body diagram for a 2 kg mass.
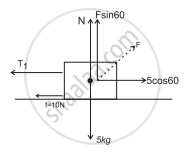
Free body diagram for a 5 kg mass.
- Apply Newton's Second Law (\[\vec F\] = m\[\vec a\]):
Write the force equation along the direction of motion: Resultant Force = mass × acceleration.
For directions without motion, the resultant force is zero (forces must cancel). - Simultaneous Solution: Write similar equations for all other masses/pulleys, and solve the simultaneous equations to find necessary quantities (e.g., tension and acceleration).
System vs. Free Body Diagram Forces
| Point | System (of two particles) | Free Body Diagram (Single particle) |
|---|---|---|
| Definition | A set of particles, colliding objects, exploding objects, etc. | Refers to forces acting on only one body at a time, and its acceleration. |
| Forces | Forces due to interaction (collision/explosion) are internal forces for the entire system. | The interaction force from the other particle is an external force acting on this single particle. |
| Total Momentum | Total linear momentum is constant (conserved), provided it is isolated. | Used to find the resultant force and acceleration for that single body. |
Significance
- It states that if the resultant force \[\vec F\] = 0, then the rate of change of linear momentum \[\frac{dp}{dt}= 0.\]
- This means the linear momentum \[\vec p\] is constant (or conserved).
- It simplifies the analysis of interactions by treating the interacting bodies as a single system.
- It is the fundamental principle used to analyse collisions and explosions.
Example
Calculate the acceleration (a) and tension (T) for an Atwood machine with masses m1 and m2 (m2 > m1).
Given: m2 > m1. m2 moves down, m1 moves up.
Step 1: Write Free Body Equations (from source Method II)
- For m1 (upward motion): T - m1g = m1a
- For m2 (downward motion): m2g - T = m2a
Step 2: Solve for Acceleration (a)
- Add the two equations: (T − m1g) + (m2g − T) = m1a + m2am2g − m1g = a(m1 + m2) g(m2 − m1) = a(m1 + m2)
- Rearrange to find a:
a = \[\left(\frac{m_2-m_1}{m_1+m_2}\right)g\]
Step 3: Solve for Tension (T)
- Using the equation for m2: T = m2g - m2a = m2(g - a)
- Substitute the expression for a:
T = \[\left(\frac{2m_1m_2}{m_1+m_2}\right)g\]
Real-Life Examples
- Rocket Propulsion: A rocket expels hot gases (mass) backwards at high speed (momentum). The total momentum of the rocket and the gas is conserved. Since the gas gains backward momentum, the rocket gains forward momentum.
- Recoil of a Gun: When a bullet is fired forward, the gun is pushed backwards. The initial total momentum (zero) is conserved; the forward momentum of the bullet is balanced by the backward momentum (recoil) of the gun.
Key Points: Principle of Conservation of Linear Momentum
- In a pulley system with M1 > M2, acceleration a = \[\left(\frac{M_1-M_2}{M_1+M_2}\right)\]g and tension T = \[\begin{pmatrix} \frac{2M_1M_2}{M_1+M_2} \end{pmatrix}\]g. Always place the heavier mass as M1.
- The total momentum of an isolated system is always conserved — if no external force acts, p remains constant \[\left(\frac{d\mathbf{p}}{dt}=0\right)\].
- Momentum is conserved only when net external force = 0; internal forces between bodies within the system do not change total momentum.
- A Free Body Diagram (FBD) shows forces and acceleration on one body at a time — in a pulley system, tension T acts up and weight Mg acts down on each mass separately.
- In an Atwood machine, both masses share the same tension and magnitude of acceleration — M1 moves down, M2 moves up simultaneously.

