Topics
Relations and Functions
Relations and Functions
Inverse Trigonometric Functions
Algebra
Matrices
- Concept of Matrices
- Types of Matrices
- Equality of Matrices
- Operations on Matrices> Addition and Subtraction of Matrices
- Operations on Matrices>Scalar Multiplication
- Operations on Matrices> Matrix Multiplication
- Transpose of a Matrix
- Symmetric and Skew Symmetric Matrices
- Invertible Matrices
- Overview of Matrices
Calculus
Determinants
Vectors and Three-dimensional Geometry
Continuity and Differentiability
- Continuous and Discontinuous Functions
- Algebra of Continuous Functions
- Concept of Differentiability
- Derivatives of Composite Functions
- Derivative of Implicit Functions
- Derivative of Inverse Function
- Exponential and Logarithmic Functions
- Logarithmic Differentiation
- Derivatives of Functions in Parametric Forms
- Second Order Derivative
- Overview of Continuity and Differentiability
Linear Programming
Applications of Derivatives
Probability
Integrals
- Introduction of Integrals
- Integration as an Inverse Process of Differentiation
- Properties of Indefinite Integral
- Methods of Integration> Integration by Substitution
- Methods of Integration>Integration Using Trigonometric Identities
- Methods of Integration> Integration Using Partial Fraction
- Methods of Integration> Integration by Parts
- Integrals of Some Particular Functions
- Definite Integrals
- Fundamental Theorem of Integral Calculus
- Evaluation of Definite Integrals by Substitution
- Properties of Definite Integrals
- Overview of Integrals
Sets
Applications of the Integrals
Differential Equations
- Basic Concepts of Differential Equations
- Order and Degree of a Differential Equation
- General and Particular Solutions of a Differential Equation
- Methods of Solving Differential Equations> Variable Separable Differential Equations
- Methods of Solving Differential Equations> Homogeneous Differential Equations
- Methods of Solving Differential Equations>Linear Differential Equations
- Overview of Differential Equations
Vectors
- Basic Concepts of Vector Algebra
- Direction Ratios, Direction Cosine & Direction Angles
- Types of Vectors in Algebra
- Algebra of Vector Addition
- Multiplication in Vector Algebra
- Components of Vector in Algebra
- Vector Joining Two Points in Algebra
- Section Formula in Vector Algebra
- Product of Two Vectors
- Overview of Vectors
Three - Dimensional Geometry
Linear Programming
Probability
Introduction
The section formula in vector algebra is used to find the position vector of a point that divides the line segment joining two given points in a fixed ratio. It connects vector representation, ratio, midpoint, centroid, and geometric interpretation in a simple algebraic form.
Maharashtra State Board: Class 12
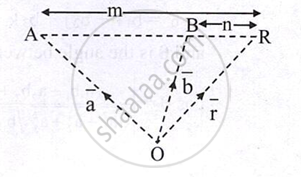
Formula: Internal Division
\[\mathbf{\overline{r}}=\mathbf{\frac{m\overline{b}+n\overline{a}}{m+n}}\]
Maharashtra State Board: Class 12
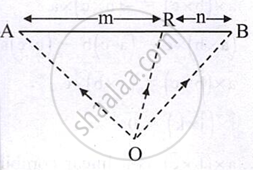
Formula: External Division
\[\overline{\mathrm{r}}=\frac{\mathrm{m\overline{b}-n\overline{a}}}{\mathrm{m-n}}\]
Maharashtra State Board: Class 12
Formula: Mid Point
If R (r̄) is the mid-point of the line segment joining the points A (ā) and B (b̄), then
\[\overline{\mathbf{r}}=\frac{\overline{\mathbf{a}}+\overline{\mathbf{b}}}{2}\]
Formula: Centroid Formula
Centroid of Triangle:
\[\mathbf{\overline{g}}=\frac{\mathbf{\overline{a}}+\mathbf{\overline{b}}+\mathbf{\overline{c}}}{3}\]
Centroid of Tetrahedron:
\[\overline{\mathbf{g}}=\frac{\overline{\mathbf{a}}+\overline{\mathbf{b}}+\overline{\mathbf{c}}+\overline{\mathbf{d}}}{4}\]
Incentre of Triangle:
\[\overline{\mathrm{h}}=\frac{\left|\overline{\mathrm{AB}}\right|\overline{\mathrm{c}}+\left|\overline{\mathrm{BC}}\right|\overline{\mathrm{a}}+\left|\overline{\mathrm{AC}}\right|\overline{\mathrm{b}}}{\left|\overline{\mathrm{AB}}\right|+\left|\overline{\mathrm{BC}}\right|+\left|\overline{\mathrm{AC}}\right|}\]
Orthocentre of Triangle:
\[\overline{\mathrm{p}}=\frac{\tan A\left(\overline{\mathrm{a}}\right)+\tan B\left(\overline{\mathrm{b}}\right)+\tan C\left(\overline{\mathrm{c}}\right)}{\tan A+\tan B+\tan C}\]
Example 1
Consider two points \[P\] and \[Q\] with position vectors \[\vec{OP} = 3\vec{a} - 2\vec{b}\] and \[\vec{OQ} = \vec{a} + \vec{b}\]. Find the position vector of a point \[R\] which divides the line joining \[P\] and \[Q\] in the ratio 2:1, (i) internally, and (ii) externally.
Solution:
- The position vector of the point \[R\]dividing the join of \[P\] and \[Q\] internally in the ratio 2:1 is
\[\vec{OR} = \frac{2(\vec{a} + \vec{b}) + (3\vec{a} - 2\vec{b})}{2 + 1} = \frac{5\vec{a}}{3}\] - The position vector of the point \[R\] dividing the join of \[P\] and \[Q\] externally in the ratio 2:1 is
\[\vec{OR} = \frac{2(\vec{a} + \vec{b}) - (3\vec{a} - 2\vec{b})}{2 - 1} = 4\vec{b} - \vec{a}\]
Real Life Examples
-
A point dividing a road between two cities in a fixed ratio can be represented mathematically using the same weighted-position idea as the section formula.
-
In computer graphics and design, intermediate positions between two points are often estimated using ratio-based placement, which is closely related to the idea behind section formula.
Key Points: Section Formula in Vector Algebra
- Section formula gives the position vector of a point dividing a line segment in a given ratio.
-
For internal division, use \(\dfrac{m\vec{b}+n\vec{a}}{m+n}\).
-
For external division, use \(\dfrac{m\vec{b}-n\vec{a}}{m-n}\).
-
Midpoint is the special case when the ratio is \(1:1\).
-
Centroid formulas are natural extensions of the same averaging idea.
