Topics
Relations and Functions
Mathematics
Inverse Trigonometric Functions
- Properties of Inverse Trigonometric Functions > Reciprocal Property
- Properties of Inverse Trigonometric Functions > Negative Argument Property
- Properties of Inverse Trigonometric Functions > Complementary Property
- Properties of Inverse Trigonometric Functions > Conversion Property
- Properties of Inverse Trigonometric Functions > Addition & Subtraction Formula for Inverse Tangent
- Properties of Inverse Trigonometric Functions > Double-angle Property
- Properties of Inverse Trigonometric Functions > Triple-angle Property
- Properties of Inverse Trigonometric Functions > Addition–Subtraction Formula for Inverse Sine & Cosine
- Properties of Inverse Trigonometric Functions > Self-adjusting Property
Applied Mathematics
Matrices
- Concept of Matrices
- Types of Matrices
- Equality of Matrices
- Operations on Matrices>Scalar Multiplication
- Operations on Matrices> Addition and Subtraction of Matrices
- Operations on Matrices>Scalar Multiplication
- Operations on Matrices> Matrix Multiplication
- Operations on Matrices> Addition and Subtraction of Matrices
- Transpose of a Matrix
- Symmetric and Skew Symmetric Matrices
- Symmetric and Skew Symmetric Matrices
- Invertible Matrices
Determinants
- Determinant Method (Cramer’s Rule)
- Concept of Determinant
- Concept of Determinant
- Properties of Determinants
- Application of Determinants to Coordinate Geometry
- Application of Determinants to Coordinate Geometry
- Minors and Co-factors
- Adjoint of a Matrix
- Operations on Matrices> Matrix Multiplication
- Application of Determinants to Coordinate Geometry
Continuity and Differentiability
- Concept of Differentiability
- Continuous and Discontinuous Functions
- Algebra of Continuous Functions
- Concept of Differentiability
- Derivatives of Composite Functions
- Derivative of Implicit Functions
- Derivative of Inverse Function
- Exponential and Logarithmic Functions
- Logarithmic Differentiation
- Derivatives of Functions in Parametric Forms
- Second Order Derivative
- Mean Value Theorem
Applications of Derivatives
Integrals
- Introduction of Integrals
- Integration as an Inverse Process of Differentiation
- Geometrical Interpretation of Indefinite Integrals
- Properties of Indefinite Integral
- Comparison Between Differentiation and Integration
- Methods of Integration> Integration by Substitution
- Methods of Integration> Integration Using Partial Fraction
- Integrals of Some Particular Functions
- Methods of Integration> Integration by Parts
- Methods of Integration>Integration Using Trigonometric Identities
- Definite Integrals
- Definite Integral as the Limit of a Sum
- Fundamental Theorem of Integral Calculus
- Evaluation of Definite Integrals by Substitution
- Properties of Definite Integrals
Applications of the Integrals
- Introduction of Applications of the Integrals
- Area Under Simple Curves
- Area Bounded by Two Curves
Differential Equations
- Basic Concepts of Differential Equations
- Order and Degree of a Differential Equation
- General and Particular Solutions of a Differential Equation
- Formation of a Differential Equation Whose General Solution is Given
- Procedure to Form a Differential Equation that Will Represent a Given Family of Curves
- Methods of Solving First Order, First Degree Differential Equations
- Methods of Solving Differential Equations> Variable Separable Differential Equations
- Methods of Solving Differential Equations> Homogeneous Differential Equations
- Methods of Solving Differential Equations>Linear Differential Equations
- Solutions of Linear Differential Equation
Vectors
- Basic Concepts of Vector Algebra
- Vector
- Vector Operations>Addition and Subtraction of Vectors
- Algebra of Vectors > Addition & Subtraction of Two Vectors
- Components of Vector in Algebra
- Vector Joining Two Points in Algebra
- Section Formula in Coordinate Geometry
- Product of Two Vectors > Scalar (Dot) Product
- Projection of a Vector on a Line
- Magnitude and Direction of a Vector
- Position Vector of a Point Dividing a Line Segment in a Given Ratio
- Scalar Triple Product
Three-dimensional Geometry
- Introduction of Three Dimensional Geometry
- Direction Cosines and Direction Ratios of a Line
- Equation of a Line in Space
- Angle Between Two Lines
- Shortest Distance Between Two Lines
- Equation of a Plane in Normal Form
- Equation of a Plane Perpendicular to a Given Vector and Passing Through a Given Point
- Equation of a Plane Passing Through Three Non Collinear Points
- Equations of Line in Different Forms
- Plane Passing Through the Intersection of Two Given Planes
- Coplanarity of Two Lines
- Angle Between Two Planes
- Distance of a Point from a Plane
- Angle Between Line and a Plane
- Vector and Cartesian Equation of a Plane
- Vector and Cartesian Equations of a Line
Linear Programming
Probability
Numbers, Quantification and Numerical Applications
- Modulo Arithmetic
- Apply Arithmetic Operations Using Modular Arithmetic Rules
- Apply the Definition of Congruence Modulo in Various Problems
- Allegation and Mixture
- Rule of Allegation to Produce a Mixture at a Given Price
- Determine the Mean Price of Amixture
- Apply Rule of Allegation
- Solve Real Life Problems Mathematically
- Boats and Streams (Entrance Exam)
- Express the Boats and Streams Problem in the Form of an Equation
- Pipes and Cisterns (Entrance Exam)
- Races and Games
- Differentiate Between Active Partner and Sleeping Partner
- Determination of Partner's Ratio
- Surface Area of a Combination of Solids
- Numerical Inequalities
Algebra
Calculus
- Second Order Derivative
- Higher Order Derivative
- Derivatives of Functions in Parametric Forms
- Derivative of Implicit Functions
- Dependent and Independent Variables
- Marginal Cost and Marginal Revenue Using Derivatives
- Maxima and Minima
Probability Distributions
Index Numbers and Time Based Data
- Index Numbers
- Test of Adequacy of Index Numbers
- Population and Sample
- Differentiate Between Population and Sample
- Representative Sample from a Population
- Parameter
- Concepts of Statistics
- Relation Between Parameter and Statistic
- Limitations of Statistics to Generalize the Estimation for Population
- Statistical Significance and Statistical Inferences
- Central Limit Theorem
- Relation Between Population, Sampling Distribution, and Sample
- Time Series Analysis
- Components of a Time Series
- Time Series Analysis for Uni-variate Data
Financial Mathematics
- Perpetuity Fund
- Sinking Fund
- Calculate Perpetuity
- Differentiate Between Sinking Fund and Saving Account
- Valuation of Bond
- Calculate Value of Bond Using present Value Approach
- Concept of EMI
- Calculation of EMI
- Fixed Instalment Method
- Interpretation Cost, Residual Value and Useful Life of an Asset
Linear Programming
Notes
Let R, S and T be three non collinear points on the plane with position vectors `vec a` , `vec b` and `vec c` respectively in following fig.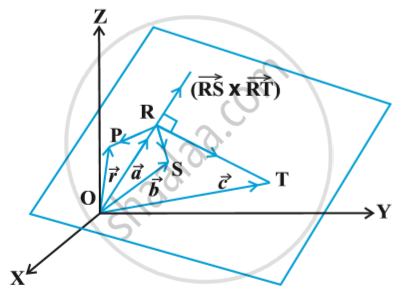
The vectors `vec (RS)` and `vec (RT)` are in the given plane. Therefore , the vector `vec (RS) xx vec (RT)` is perpendicular to the plane containing points R,S and T. Let `vec r`be the position vector of any point P in the plane. Therefore, the equation of the plane passing through R and perpendicular to the vector `vec (RS) xx vec (RT)` is
`(vec r - vec a) . (vec (RS) xx vec (RT)) = 0`
or `(vec r - vec a) . [(vec b - vec a) xx (vec c - vec a)] = 0` ...(1)
If the three points were on the same line, then there will be many planes that will contain them Fig.
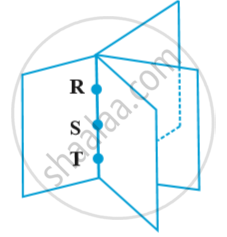
for example , These planes will resemble the pages of a book where the line containing the points R, S and T are members in the binding of the book.
Cartesian form:
Let `(x_1,y_1,z_1) , (x_2 , y_2 , z_2)` and `(x_3 , y_3 , z_3)` be the coordinates of the points R, S and T respectively. Let (x, y, z) be the coordinates of any point P on the plane with position vector `vec r`. Then
`vec (RP) = (x - x_1) hat i + ( y - y_1) hat j + (z - z_1) hat k`
`vec (RS) = (x_2 - x_1) hat i + ( y_2 - y_1) hat j + (z_2 - z_1) hat k`
`vec (RT) = (x_3 - x_1) hat i + ( y_3 - y_1) hat j + (z_3 - z_1) hat k`
Substituting these values in equation (1) of the vector form and expressing it in the form of a determinant, we have
`|(x - x_1 , y - y_1 , z - z_1),(x_2 - x_1 , y_2 - y_1, z_2 -z_1) ,(x_3 - x_1, y_3 - y_1, z_3 - z_1) | = 0`
which is the equation of the plane in Cartesian form passing through three non collinear points `(x_1, y_1, z_1), (x_2, y_2, z_2)` and `(x_3, y_3, z_3).`
Video link : https://youtu.be/PCyo3E5kOcw
