Definitions [16]
A vector is a quantity that has magnitude as well as direction. Geometrically, a vector is represented by a directed line segment such as \[\vec{AB}\], where A is the initial point and B is the terminal point.
A scalar quantity is a physical quantity that has magnitude only.
A vector quantity is a physical quantity that has magnitude as well as direction.
In three-dimensional geometry, the vector drawn from the origin O(0, 0, 0) to a point P(x, y, z) is called the position vector of the point P. It is written as \[\vec{OP}\]. If point P(x, y, z) is given, then the magnitude of its position vector is:
The magnitude of vector \[\vec{AB}\] is the length of the directed line segment AB. It is written as \[|\vec{AB}|\], \[|\vec{a}|\], or simply a. The magnitude of a vector is never negative because it represents length.
If l, m, n are direction cosines of a line and if a, b, c are real numbers such that \[\frac{\mathrm{a}}{l}=\frac{\mathrm{b}}{\mathrm{m}}=\frac{\mathrm{c}}{\mathrm{n}}=\lambda,\] then a, b, c are called direction ratios of that line.
The angles made by a vector with the positive directions of the X-axis, Y-axis and Z-axis are called direction angles of the vector, denoted by α, β, and γ.
If α, β and γ are the direction angles of a vector, then the cosines of these angles, i.e.
l = cosα, m = cosβ, n = cosγ
are called the direction cosines of the vector.
If point is (x,y,z) and distance r: \[\cos\alpha=\frac{x}{r},\quad\cos\beta=\frac{y}{r},\quad\cos\gamma=\frac{z}{r}\]
If \[\vec{a}\] is a vector and \[\lambda\] is a scalar, then \[\lambda\vec{a}\] is called the multiplication of the vector \[\vec{a}\] by the scalar \[\lambda\]. The resulting quantity is also a vector, and it is collinear with \[\vec{a}\].
If P(x, y, z) is a point, then its position vector is
This is called the component form of a vector.
If \[P_1(x_1, y_1, z_1)\] and \[P_2(x_2, y_2, z_2)\] are two points in space, then the vector joining \[P_1\] to \[P_2\] is the vector
\[\vec{P_1P_2}\]
representing the displacement from \[P_1\] (initial point) to \[P_2\] (terminal point).
Magnitude of vector:
If \[\vec{a}\] and \[\vec{b}\] are two vectors and \[\theta\] is the angle between them, then their scalar product is given by:
If \[\vec{a}\] and \[\vec{b}\] are two vectors with angle \[\theta\] between them, then their vector product is:
where \[\hat{n}\] is a unit vector perpendicular to both \[\vec{a}\] and \[\vec{b}\], in the direction given by the right-hand rule.
Cross Product Angle: \[\sin \theta = \frac{|\vec{a} \times \vec{b}|}{|\vec{a}| |\vec{b}|}\]
Projection is the part of one vector in the direction of another vector.
Scalar projection of \[\vec{a}\] on \[\vec{b}\]
Vector projection of \[\vec{a}\] on \[\vec{b}\]
For any three given vectors, the scalar product of one of the vectors and the cross product of the remaining two, is called a scalar triple product
Thus, \[\vec{a},\vec{b},\vec{c}\] are three vectors, then \[(\vec{a}\times\vec{b})\cdot\vec{c}\]is called the scalar triple product and is denoted by \[[\vec{a}\vec{b}\vec{c}]\mathrm{~or~}[a,b,c]\]
When the direction of rotation is anticlockwise, then the rotation will move the screw upwards. It is called a right-handed orientation or a right-handed screw rule.
Formulae [4]
If R (r̄) is the mid-point of the line segment joining the points A (ā) and B (b̄), then
\[\overline{\mathbf{r}}=\frac{\overline{\mathbf{a}}+\overline{\mathbf{b}}}{2}\]
Centroid of Triangle:
\[\mathbf{\overline{g}}=\frac{\mathbf{\overline{a}}+\mathbf{\overline{b}}+\mathbf{\overline{c}}}{3}\]
Centroid of Tetrahedron:
\[\overline{\mathbf{g}}=\frac{\overline{\mathbf{a}}+\overline{\mathbf{b}}+\overline{\mathbf{c}}+\overline{\mathbf{d}}}{4}\]
Incentre of Triangle:
\[\overline{\mathrm{h}}=\frac{\left|\overline{\mathrm{AB}}\right|\overline{\mathrm{c}}+\left|\overline{\mathrm{BC}}\right|\overline{\mathrm{a}}+\left|\overline{\mathrm{AC}}\right|\overline{\mathrm{b}}}{\left|\overline{\mathrm{AB}}\right|+\left|\overline{\mathrm{BC}}\right|+\left|\overline{\mathrm{AC}}\right|}\]
Orthocentre of Triangle:
\[\overline{\mathrm{p}}=\frac{\tan A\left(\overline{\mathrm{a}}\right)+\tan B\left(\overline{\mathrm{b}}\right)+\tan C\left(\overline{\mathrm{c}}\right)}{\tan A+\tan B+\tan C}\]
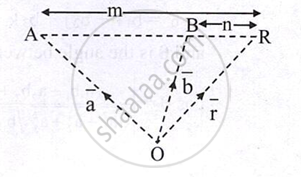
\[\mathbf{\overline{r}}=\mathbf{\frac{m\overline{b}+n\overline{a}}{m+n}}\]
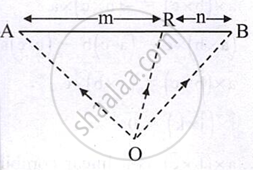
\[\overline{\mathrm{r}}=\frac{\mathrm{m\overline{b}-n\overline{a}}}{\mathrm{m-n}}\]
Theorems and Laws [3]
If two vectors are represented by two sides of a triangle taken in order, then their sum is represented by the third side of the triangle taken in the same order.
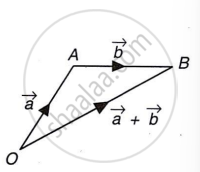
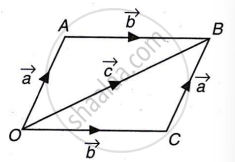
If two vectors are represented by two adjacent sides of a parallelogram, then their resultant is represented by the diagonal passing through their common initial point.
The difference of two vectors is obtained by adding the negative of one vector.
Key Points
-
Scalars have only magnitude.
-
Vectors have magnitude and direction.
-
Vectors are represented by directed line segments.
-
\[\vec{AB}\] represents a vector from A to B.
-
Magnitude of a vector is its length and is always non-negative.
-
\[\vec{OP}\] is the position vector of point \[P(x, y, z)\].
-
\[|\vec{OP}| = \sqrt{x^2 + y^2 + z^2}\].
-
Direction angles are the angles a line makes with the positive coordinate axes.
-
Direction cosines are \[\cos \alpha\], \[\cos \beta\], and \[\cos \gamma\].
-
If direction cosines are (l, m, n), then \[l^2 + m^2 + n^2 = 1\].
-
Direction ratios are any numbers proportional to direction cosines.
-
If direction ratios are (a, b, c), then corresponding direction cosines are:
-
For points \[A(x_1, y_1, z_1)\], \[B(x_2, y_2, z_2)\], direction ratios of AB are \[(x_2 - x_1, y_2 - y_1, z_2 - z_1)\].
-
Angle between two lines can be found using either direction cosines or direction ratios.
| Type of Vector | Definition | Main Property | Simple Recall Cue |
|---|---|---|---|
| Zero vector | Initial and terminal points are same | Magnitude = 0 | No displacement |
| Unit vector | Magnitude is 1 | Gives direction conveniently | Length 1 |
| Coinitial vectors | Same starting point | Start together | Common origin |
| Collinear vectors | Parallel to same line | Lie along one line | Same line |
| Equal vectors | Same magnitude and direction | Position may differ | Same length + same direction |
| Negative vectors | Same magnitude, opposite direction | Sign changes direction | Reverse arrow |
| Free vectors | Can shift parallelly without change | Independent of position | Slide without changing |
-
A vector has both magnitude and direction.
-
Resultant means the combined effect of two or more vectors.
-
Triangle law uses head-to-tail arrangement.
-
Parallelogram law uses adjacent sides from the same initial point.
-
Vector addition is commutative and associative.
-
Zero vector is the identity element for vector addition.
-
Difference of vectors is obtained by adding the negative of a vector.
-
Multiplication of a vector by a scalar gives a new vector collinear with the original.
-
Magnitude scales by \[|\lambda|\]; direction depends on the sign of \[\lambda\].
-
\[\lambda > 0\]: Same direction; \[\lambda < 0\]: Opposite direction.
-
\[\lambda = 0\]: Result is the null vector.
-
Used extensively in components form: multiply each component by the scalar.
-
Initial point: starting point of vector; terminal point: ending point.
-
Vector joining \[P_1(x_1, y_1, z_1)\] to \[P_2(x_2, y_2, z_2)\]:
\[\vec{P_1P_2} = (x_2 - x_1)\hat{i} + (y_2 - y_1)\hat{j} + (z_2 - z_1)\hat{k}\] -
Order matters: \[\vec{P_1P_2} = -\vec{P_2P_1}\]
-
Magnitude equals distance between points:
\[|\vec{P_1P_2}| = \sqrt{(x_2 - x_1)^2 + (y_2 - y_1)^2 + (z_2 - z_1)^2}\]
- Section formula gives the position vector of a point dividing a line segment in a given ratio.
-
For internal division, use \(\dfrac{m\vec{b}+n\vec{a}}{m+n}\).
-
For external division, use \(\dfrac{m\vec{b}-n\vec{a}}{m-n}\).
-
Midpoint is the special case when the ratio is \(1:1\).
-
Centroid formulas are natural extensions of the same averaging idea.
-
Dot product result is a scalar.
-
Cross product result is a vector.
-
Dot product uses cosine; cross product uses sine.
-
Dot product helps in angle and projection questions.
-
Cross product helps in area and direction questions.
-
\[\vec{a} \cdot \vec{b} = 0\] indicates perpendicular non-zero vectors.
-
\[\vec{a} \times \vec{b} = \vec{0}\] indicates parallel vectors.
- Applications of Cross Product:
Area of Triangle:
\[\frac{1}{2}|\vec{a} \times \vec{b}|\]Area of Parallelogram:
\[|\vec{a} \times \vec{b}|\]
-
Position of dot & cross doesn’t matter
\[(\vec{a}\times\vec{b})\cdot\vec{c}=\vec{a}\cdot(\vec{b}\times\vec{c})\] -
Cyclic order unchanged ⇒ STP unchanged
\[[\vec{a}\operatorname{\vec{b}}\vec{c}]=[\vec{b}\operatorname{\vec{c}}\vec{a}]=[\vec{c}\operatorname{\vec{a}}\vec{b}]\] -
Interchanging two vectors changes the sign
\[[\vec{a}\operatorname{\vec{b}}\vec{c}]=-\left[\vec{b}\operatorname{\vec{a}}\vec{c}\right]\] - If any two vectors are equal
\[[\vec{a}\operatorname{\vec{a}}\vec{b}]=0\]
- If any two vectors are parallel
\[[\vec{a}\operatorname{\vec{b}}\operatorname{\vec{c}}]=0\]
Important Questions [15]
- Assertion (A): If a line makes angles α, β, γ with positive direction of the coordinate axes, then sin2 α + sin2 β + sin2 γ = 2. Reason (R): The sum of squares of the direction cosines of a line is 1
- A line l passes through point (– 1, 3, – 2) and is perpendicular to both the lines x1=y2=z3 and x+2-3=y-12=z+15. Find the vector equation of the line l. Hence, obtain its distance from the origin.
- Find the position vector of the foot of perpendicular and the perpendicular distance from the point P with position vector
- Write the Position Vector of the Point Which Divides the Join of Points with Position Vectors
- Find the position vector of a point which divides the join of points with position vectors a−2b and 2a+b externally in the ratio 2 : 1
- Find the value of 'p' for which the vectors 3i+2j+9k and i-2pj+3k are parallel
- If → a × → B = → C × → D and → a × → C = → B × → D , Show that → a − → D is Parallel to → B − → C Where → a ≠ → D and → B ≠ → C .
- If points A, B and C have position vectors 2i^,j^ and 2k^ respectively, then show that ΔABC is an isosceles triangle.
- If ˆ I + ˆ J + ˆ K , 2 ˆ I + 5 ˆ J , 3 ˆ I + 2 ˆ J − 3 ˆ K and ˆ I − 6 ˆ J − ˆ K Respectively Are the Position Vectors A, B, C and D, Then Find the Angle Between the Straight Lines Ab and Cd.
- If a→,b→,c→ are three vectors such that a→.b→=a→.c→ and a→×b→=a→×c→,a→≠0, then show that b→=c→.
- If ∣a→| = 3, |b→| = 5, |c→| = 4 and a→+b→+c→ = 0→, then find the value of (a→.b→+b→.c→+c→.a→).
- Write the number of vectors of unit length perpendicular to both the vectors a=2i+j+2k and b=j+k
- If a=4i-j+K Then Find a Unit Vector Parallel to the Vector A+B
- Two vectors a→=a1i^+a2j^+a3k^ and b→=b1i^+b2j^+b3k^ are collinear if ______.
- Find the Area of a Parallelogram Whose Adjacent Sides Are Represented by the Vectors 2 ^ I − 3 ^ K and 4 ^ J + 2 ^ K .
Concepts [10]
- Basic Concepts of Vector Algebra
- Direction Ratios, Direction Cosine & Direction Angles in Vector
- Types of Vectors in Algebra
- Algebra of Vectors > Addition & Subtraction of Two Vectors
- Multiplication in Vector Algebra
- Components of Vector in Algebra
- Vector Joining Two Points in Algebra
- Section Formula in Vector Algebra
- Product of Two Vectors > Scalar (Dot) Product
- Overview of Vectors
