Definitions [17]
A scalar quantity is a physical quantity that has magnitude only.
In three-dimensional geometry, the vector drawn from the origin O(0, 0, 0) to a point P(x, y, z) is called the position vector of the point P. It is written as \[\vec{OP}\]. If point P(x, y, z) is given, then the magnitude of its position vector is:
The magnitude of vector \[\vec{AB}\] is the length of the directed line segment AB. It is written as \[|\vec{AB}|\], \[|\vec{a}|\], or simply a. The magnitude of a vector is never negative because it represents length.
A vector is a quantity that has magnitude as well as direction. Geometrically, a vector is represented by a directed line segment such as \[\vec{AB}\], where A is the initial point and B is the terminal point.
A vector quantity is a physical quantity that has magnitude as well as direction.
If P(x, y, z) is a point, then its position vector is
This is called the component form of a vector.
The scalar product or dot product of two nonzero vectors \[\vec P\] and \[\vec Q\] is defined as the product of the magnitudes of the two vectors and the cosine of the angle θ between the two vectors.
The scalar triple product of three vectors a, b, and c is defined as
(a × b) · c = |a| |b| |c| sinθ cosφ,
where θ is the angle between a and b, and φ is the angle between a × b and c. It is also defined as [a b c].
For vectors \[\overline{a}\], \[\overline{b}\] and \[\overline{c}\] in the space, we define the vector triple product as
\[\overset{-}{\operatorname*{\operatorname*{a}}}\times\left(\overset{-}{\operatorname*{\operatorname*{b}}}\times\overset{-}{\operatorname*{\operatorname*{c}}}\right)=\left(\overset{-}{\operatorname*{\operatorname*{a}}}\cdot\overset{-}{\operatorname*{\operatorname*{c}}}\right)\overline{b}-\left(\overset{-}{\operatorname*{\operatorname*{a}}}\cdot\overline{b}\right)\overline{c}\]
A vector quantity is a physical quantity that has magnitude as well as direction.
A scalar quantity is a physical quantity that has magnitude only.
The magnitude of vector \[\vec{AB}\] is the length of the directed line segment AB. It is written as \[|\vec{AB}|\], \[|\vec{a}|\], or simply a. The magnitude of a vector is never negative because it represents length.
A vector is a quantity that has magnitude as well as direction. Geometrically, a vector is represented by a directed line segment such as \[\vec{AB}\], where A is the initial point and B is the terminal point.
In three-dimensional geometry, the vector drawn from the origin O(0, 0, 0) to a point P(x, y, z) is called the position vector of the point P. It is written as \[\vec{OP}\]. If point P(x, y, z) is given, then the magnitude of its position vector is:
If \[\vec{a}\] and \[\vec{b}\] are two vectors with angle \[\theta\] between them, then their vector product is:
where \[\hat{n}\] is a unit vector perpendicular to both \[\vec{a}\] and \[\vec{b}\], in the direction given by the right-hand rule.
Cross Product Angle: \[\sin \theta = \frac{|\vec{a} \times \vec{b}|}{|\vec{a}| |\vec{b}|}\]
Projection is the part of one vector in the direction of another vector.
Scalar projection of \[\vec{a}\] on \[\vec{b}\]
Vector projection of \[\vec{a}\] on \[\vec{b}\]
If \[\vec{a}\] and \[\vec{b}\] are two vectors and \[\theta\] is the angle between them, then their scalar product is given by:
Formulae [4]
\[\vec{A}\cdot\vec{B}=|\vec{A}||\vec{B}|\cos\theta=AB\cos\theta\]
Parallelepiped: Volume = [a b c]
Tetrahedron: \[\frac{1}{6}\] [a b c]
\[P\left(\frac{m_1x_2+m_2x_1}{m_1+m_2},\frac{m_1y_2+m_2y_1}{m_1+m_2}\right)\]
Area of parallelogram = base x height
Theorems and Laws [7]
If a number of vectors are represented both in magnitude and direction by the sides of an open polygon taken in the same order, then their resultant is represented both in magnitude and direction by the closing side of the polygon taken in opposite order — this is called the Polygon Law of Vector Addition.
Prove by vector method, that the angle subtended on semicircle is a right angle.
Let seg AB be a diameter of a circle with centre C and P be any point on the circle other than A and B.
Then ∠APB is an angle subtended on a semicircle.
Let `bar"AC" = bar"CB" = bar"a"` and `bar"CP" = bar"r"`
Then `|bar"a"| = |bar"r"|` ....(1)

`bar"AP" = bar"AC" + bar"CP"`
= `bar"a" + bar"r"`
= `bar"r" + bar"a"`
`bar"BP" = bar"BC" + bar"CP"`
= `- bar"CB" + bar"CP"`
= `- bar"a" + bar"r"`
∴ `bar"AP".bar"BP" = (bar"r" + bar"a").(bar"r" - bar"a")`
= `bar"r".bar"r" - bar"r".bar"a" + bar"a".bar"r" - bar"a".bar"a"`
= `|bar"r"|^2 - |bar"a"|^2`
= 0 ....`(∵ bar"r".bar"a" = bar"a".bar"r")`
∴ `bar"AP" ⊥ bar"BP"`
∴ ∠APB is a right angle.
Hence, the angle subtended on a semicircle is the right angle.
Consider the circle with the centre at O and AB is the diameter.
Let `bar(OA) = bar a, bar(OB) = bar b, bar(OC) = bar c`

∴ `|bar a| =|bar b| = |bar c| = r` ...(1)
and `bar a = -bar b` ...(2)
Consider:
`bar (AC) * bar (BC) = (bar c - bar a) * (bar c - bar b)`
= `(bar c - bar a) * (bar c + bar a)` ...[From (2)]
= `|bar c|^2 - |bar a|^2`
= r2 − r2 ...[From (1)]
= 0
∴ `bar(AC) * bar(BC) = 0`
∴ `bar(AC)` is perpendicular to `bar(BC)`
∴ ∠ACB = 90°
∴ Angle subtended on semi-circle is a right angle.
Using properties of scalar triple product, prove that `[(bara + barb, barb + barc, barc + bara)] = 2[(bara, barb, barc)]`.
L.H.S = `[(bara + barb, barb + barc, barc + bara)]`
= `(bara + barb) . [(barb + barc) xx (barc + bara)]`
= `(bara + barb) . [barb xx barc + barb xx bara + barc xx barc + barc xx bara]`
= `(bara + barb) . [barb xx barc + barb xx bara + barc xx bara] ...[∵ barc xx barc = bar0]`
= `bara . [(barb xx barc) + (barb xx bara) + (barc xx bara)] + barb . [(barb xx barc) + (barb xx bara) + (barc xx bara)]`
= `bara . (barb xx barc) + bara . (barb xx bara) + bara . (barc xx bara) + barb . (barb xx barc) + barb(barb xx bara) + barb(barc xx bara)`
= `[bara barb barc] + [bara barb bara] + [bara barc bara] + [barb barb barc] + [barb barb bara] + [barb barc bara]`
= `[bara barb barc] + 0 + 0 + 0 + 0 + [bara barb barc]`
= `2[bara barb barc]`
= R.H.S
If D, E, F are the midpoints of the sides BC, CA, AB of a triangle ABC, prove that `bar(AD) + bar(BE) + bar(CF) = bar0`.
Let `bara, barb, barc, bard, bare, barf` be the position vectors of the points A, B, C, D, E, F respectively.
Since D, E, F are the midpoints of BC, CA, AB respectively, by the midpoint formula
`bard = (barb + barc)/2, bare = (barc + bara)/2, barf = (bara + barb)/2`
∴ `bar(AD) + bar(BE) + bar(CF) = (bard - bara) + (bare - barb) + (barf - barc)`
= `((barb + barc)/2 - bara) + ((barc + bara)/2 - barb) + ((bara + barb)/2 - barc)`
= `1/2barb + 1/2barc - bara + 1/2barc + 1/2bara - barb + 1/2bara + 1/2barb - barc`
= `1/2(barb + barc - 2bara + bar c + bara - 2barb + bara + barb - 2barc)`
= `(bara + barb + barc) - (bara + barb + barc) = bar0`.
Let `A(bara)` and `B(barb)` are any two points in the space and `R(barr)` be a point on the line segment AB dividing it internally in the ratio m : n, then prove that `barr = (mbarb + nbara)/(m + n)`.
R is a point on the line segment AB(A – R – B) and `bar(AR)` and `bar(RB)` are in the same direction.
Point R divides AB internally in the ratio m : n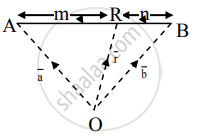
∴ `(AR)/(RB) = m/n`
∴ n(AR) = m(RB)
As `n(bar(AR))` and `m(bar(RB))` have same direction and magnitude,
`n(bar(AR)) = m(bar(RB))`
∴ `n(bar(OR) - bar(OA)) = m(bar(OB) - bar(OR))`
∴ `n(vecr - veca) = m(vecb - vecr)`
∴ `nvecr - nveca = mvecb - mvecr`
∴ `mvecr + nvecr = mvecb + nveca`
∴ `(m + n)vecr = mvecb + nveca`
∴ `vecr = (mvecb + nveca)/(m + n)`
Let `A(bara)` and `B(barb)` be any two points in the space and `R(barr)` be the third point on the line AB dividing the segment AB externally in the ratio m : n, then prove that `barr = (mbarb - nbara)/(m - n)`.
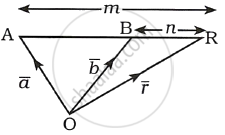
As the point R divides the line segment AB externally, we have either A-B-R or R-A-B.
Assume that A-B-R and `bar(AR) : bar(BR)` = m : n
∴ `(AR)/(BR) = m/n` so n(AR) = m(BR)
As `n(bar(AR))` and `m(bar(BR))` have same magnitude and direction,
∴ `n(bar(AR)) = m(bar(BR))`
∴ `n(barr - bara) = m(barr - barb)`
∴ `nbarr - nbara = mbarr - mbarb`
∴ `mbarr - nbarr = mbarb - nbara`
∴ `(m - n)barr = mbarb - nbara`
∴ `barr = (mbarb - nbara)/(m - n)`
Hence proved.
By vector method prove that the medians of a triangle are concurrent.

Let A, B and C be vertices of a triangle.
Let D, E and F be the mid-points of the sides BC, AC and AB respectively.
Let `bara, barb, barc, bard, bare` and `barf` be position vectors of points A, B, C, D, E and F respectively.
Therefore, by mid-point formula,
∴ `bard = (barb + barc)/2, bare = (bara + barc)/2` and `barf = (bara + barb)/2`
∴ `2bard = barb + barc, 2bare = bara + barc` and `2barf = bara + barb`
∴ `2bard + bara = bara + barb + barc`, similarly `2bare + barb = 2barf + barc = bara + barb + barc`
∴ `(2bard + bara)/3 = (2bare + barb)/3 = (2barf + barc)/3 = (bara + barb + barc)/3 = barg` ...(Say)
Then we have `barg = (bara + barb + barc)/3 = ((2)bard + (1)bara)/(2 + 1) = ((2)bare + (1)barb)/(2 + 1) = ((2)barf + (1)barc)/(2 + 1)`
If G is the point whose position vector is `barg`, then from the above equation it is clear that the point G lies on the medians AD, BE, CF and it divides each of the medians AD, BE, CF internally in the ratio 2 : 1.
Therefore, three medians are concurrent.
Key Points
-
Scalars have only magnitude.
-
Vectors have magnitude and direction.
-
Vectors are represented by directed line segments.
-
\[\vec{AB}\] represents a vector from A to B.
-
Magnitude of a vector is its length and is always non-negative.
-
\[\vec{OP}\] is the position vector of point \[P(x, y, z)\].
-
\[|\vec{OP}| = \sqrt{x^2 + y^2 + z^2}\].
- Distance vs Displacement: Distance (5 km) is scalar; displacement (5 km north) is vector.
- Speed vs Velocity: Speed (60 km/h) is scalar; velocity (60 km/h north) is vector.
- Vectors add differently: You cannot simply add vectors like scalars. A 5 N force east + 5 N force north ≠ 10 N!
-
Component Method: Resultant R = A + B is found as Rx = Ax + Bx, Ry = Ay + By, Rz = Az + Bz, giving R = Rx\[\hat i\] + Ry\[\hat j\] + Rz\[\hat k\].
-
Laws of Addition: Triangle law (head-to-tail), Parallelogram law (tail-to-tail, diagonal = resultant), and Polygon law (for multiple vectors, closing side = resultant).
-
Magnitude (Addition): When A and B are at angle θ, R = \[\sqrt{A^2+B^2+2AB\cos\theta}\].
-
Magnitude (Subtraction): Change the sign to minus — ∣R∣ = .
-
Direction of Resultant: tanα = \[\frac{B\sin\theta}{A+B\cos\theta}\] for addition; tanβ = \[\frac{B\sin\theta}{A-B\cos\theta}\] for subtraction.
-
Scalars have only magnitude.
-
Vectors have magnitude and direction.
-
Vectors are represented by directed line segments.
-
\[\vec{AB}\] represents a vector from A to B.
-
Magnitude of a vector is its length and is always non-negative.
-
\[\vec{OP}\] is the position vector of point \[P(x, y, z)\].
-
\[|\vec{OP}| = \sqrt{x^2 + y^2 + z^2}\].
-
Dot product result is a scalar.
-
Cross product result is a vector.
-
Dot product uses cosine; cross product uses sine.
-
Dot product helps in angle and projection questions.
-
Cross product helps in area and direction questions.
-
\[\vec{a} \cdot \vec{b} = 0\] indicates perpendicular non-zero vectors.
-
\[\vec{a} \times \vec{b} = \vec{0}\] indicates parallel vectors.
- Applications of Cross Product:
Area of Triangle:
\[\frac{1}{2}|\vec{a} \times \vec{b}|\]Area of Parallelogram:
\[|\vec{a} \times \vec{b}|\]
Concepts [19]
- Basic Concepts of Vector Algebra
- Vector Analysis
- Vector Operations>Addition and Subtraction of Vectors
- Components of Vector in Algebra
- Multiplication of Vectors>Scalar Product(Dot Product)
- Scalar Triple Product
- Vector Triple Product
- Basic Concepts of Vector Algebra
- Section Formula in Coordinate Geometry
- Linear Dependent and Independent Vectors
- Position Vector of a Point in a Space
- Modulus of a Vector
- Collinearity of Three Points
- Coplanarity of Three Vectors and Four Points
- Vector Inequality
- Product of Two Vectors > Scalar (Dot) Product
- Projection of a Vector Along Any Other Vector
- Area of a Parallelogram
- Geometric Interpretation of the Area of a Triangle
