Definitions [21]
Scalar: Those quantities which have magnitude but no direction are called scalar quantities or scalars. e.g. length, mass, volume, temperature, work, etc.
Vector: Those quantities which have magnitude as well as direction are called vector quantities or vectors. e.g. force, displacement, velocity, etc.
Representation A vector is represented as a or bold letter (a).
A vector that has a magnitude of one unit and is used to indicate direction is called a unit vector.
A physical quantity that is described with both magnitude and direction is called a vector.
Vectors that are perpendicular to each other are called orthogonal vectors.
Vectors that act in the same plane are called coplanar vectors.
When a vector \[\vec P\] is split into two mutually perpendicular parts along the horizontal and vertical axes, those parts are called rectangular components.
A physical quantity that is described with magnitude alone is called a scalar.
A vector that has the same magnitude as a given vector but acts in the opposite direction is called a negative vector.
A vector whose magnitude is zero is called a zero vector.
A vector that describes the position of a point with respect to the origin is called a position vector.
Two vectors having the same magnitude and the same direction are called equal vectors.
In general, if a₁, a₂, …, aₙ are n vectors and t₁, t₂, …, tₙ are n scalars, then linear combination of vectors a₁, a₂, …, aₙ is t₁a₁ + t₂a₂ + … + tₙaₙ.
-
For 2 vectors:
\[\overline{\mathbf{r}}=x\overline{\mathbf{a}}+y\overline{\mathbf{b}}\] -
For 3 vectors:
\[\mathbf{\overline{r}}=x\mathbf{\overline{a}}+y\mathbf{\overline{b}}+\mathbf{z}\mathbf{\overline{c}}\]
Two vectors a and b are collinear if there exists a scalar λ such that a = λb.
Three points A(a), B(b) and C(c) are collinear iff ∃ non-zero scalars x, y, z such that xa + yb + zc = 0, where x + y + z = 0.
Three points A(a), B(b) and C(c) are collinear if AB × BC = 0 i.e. a × b + b × c + c × a = 0.
a and b are two non-collinear vectors. A vector r is coplanar with a and b if and only if there exists a unique scalar λ₁ and λ₂ such that r = λ₁a + λ₂b
Three vectors a₁i + a₂j + a₃k, b₁i + b₂j + b₃k and c₁i + c₂j + c₃k are coplanar, if \[\begin{vmatrix} a_{1} & a_{2} & a_{3} \\ b_{1} & b_{2} & b_{3} \\ c_{1} & c_{2} & c_{3} \end{vmatrix}=0.\]
Four points with position vectors a = a₁i + a₂j + a₃k, b = b₁i + b₂j + b₃k, c = c₁i + c₂j + c₃k and d = d₁i + d₂j + d₃k will be coplanar iff
\[\begin{vmatrix} a_1 & a_2 & a_3 & 1 \\ b_1 & b_2 & b_3 & 1 \\ c_1 & c_2 & c_3 & 1 \\ d_1 & d_2 & d_3 & 1 \end{vmatrix}=0.\]
If ā and b̄ are any two vectors, then the scalar product of these vectors is
ā · b̄ = |ā| |b̄| cos θ = ab cos θ, where θ is the angle between ā and b̄.
If α, β and γ are the direction angles of a vector, then the cosines of these angles, i.e.
l = cosα, m = cosβ, n = cosγ
are called the direction cosines of the vector.
If point is (x,y,z)and distance r: \[\cos\alpha=\frac{x}{r},\quad\cos\beta=\frac{y}{r},\quad\cos\gamma=\frac{z}{r}\]
The angles made by a vector with the positive directions of the X-axis, Y-axis and Z-axis are called direction angles of the vector, denoted by α, β, and γ.
If l, m, n are direction cosines of a line and if a, b, c are real numbers such that \[\frac{\mathrm{a}}{l}=\frac{\mathrm{b}}{\mathrm{m}}=\frac{\mathrm{c}}{\mathrm{n}}=\lambda,\] then a, b, c are called direction ratios of that line.
The vector product of two non-null and non-parallel vectors a and b is expressed as:
a × b = |a||b| sinθ n̂ = ab sinθ n̂
The unit vector n̂ along a × b is given by:
\[\hat{\mathbf{n}}=\frac{\mathbf{a}\times\mathbf{b}}{|\mathbf{a}\times\mathbf{b}|}\]
The scalar triple product of three vectors a, b, and c is defined as
(a × b) · c = |a| |b| |c| sinθ cosφ,
where θ is the angle between a and b, and φ is the angle between a × b and c. It is also defined as [a b c].
For vectors \[\overline{a}\], \[\overline{b}\] and \[\overline{c}\] in the space, we define the vector triple product as
\[\overset{-}{\operatorname*{\operatorname*{a}}}\times\left(\overset{-}{\operatorname*{\operatorname*{b}}}\times\overset{-}{\operatorname*{\operatorname*{c}}}\right)=\left(\overset{-}{\operatorname*{\operatorname*{a}}}\cdot\overset{-}{\operatorname*{\operatorname*{c}}}\right)\overline{b}-\left(\overset{-}{\operatorname*{\operatorname*{a}}}\cdot\overline{b}\right)\overline{c}\]
Formulae [12]
\[\vec P\] ⋅ \[\vec Q\] = PQ cos θ
| θ | Dot Product |
|---|---|
| 0° | PQ |
| 90° | 0 |
| 180° | −PQ |
∣\[\vec P\] × \[\vec Q\]∣ = PQ sin θ
| θ | Cross Product |
|---|---|
| 0° | 0 |
| 90° | PQ |
| 180° | 0 |
If two vectors \[\vec P\] and \[\vec Q\] act at an angle θ, the magnitude of their resultant is:
| Condition | Angle | Resultant |
|---|---|---|
| Parallel vectors | 0° | R = P + Q |
| Perpendicular vectors | 90° | R = \[\sqrt{P^{2}+Q^{2}}\] |
| Anti-parallel vectors | 180° | R = P − Q |
If a vector \[\vec P\] is resolved into two rectangular components:
- Horizontal component: Px = P cos θ
- Vertical component: Py = P sin θ
Magnitude of Vector: \[\mid r\mid=\sqrt{x^{2}+y^{2}}\]
\[\theta=\tan^{-1}\left(\frac{y}{x}\right)\]
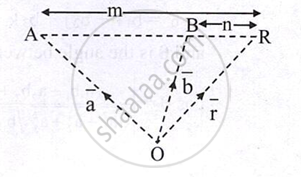
\[\mathbf{\overline{r}}=\mathbf{\frac{m\overline{b}+n\overline{a}}{m+n}}\]
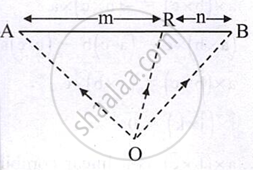
\[\overline{\mathrm{r}}=\frac{\mathrm{m\overline{b}-n\overline{a}}}{\mathrm{m-n}}\]
If R (r̄) is the mid-point of the line segment joining the points A (ā) and B (b̄), then
\[\overline{\mathbf{r}}=\frac{\overline{\mathbf{a}}+\overline{\mathbf{b}}}{2}\]
Centroid of Triangle:
\[\mathbf{\overline{g}}=\frac{\mathbf{\overline{a}}+\mathbf{\overline{b}}+\mathbf{\overline{c}}}{3}\]
Centroid of Tetrahedron:
\[\overline{\mathbf{g}}=\frac{\overline{\mathbf{a}}+\overline{\mathbf{b}}+\overline{\mathbf{c}}+\overline{\mathbf{d}}}{4}\]
Incentre of Triangle:
\[\overline{\mathrm{h}}=\frac{\left|\overline{\mathrm{AB}}\right|\overline{\mathrm{c}}+\left|\overline{\mathrm{BC}}\right|\overline{\mathrm{a}}+\left|\overline{\mathrm{AC}}\right|\overline{\mathrm{b}}}{\left|\overline{\mathrm{AB}}\right|+\left|\overline{\mathrm{BC}}\right|+\left|\overline{\mathrm{AC}}\right|}\]
Orthocentre of Triangle:
\[\overline{\mathrm{p}}=\frac{\tan A\left(\overline{\mathrm{a}}\right)+\tan B\left(\overline{\mathrm{b}}\right)+\tan C\left(\overline{\mathrm{c}}\right)}{\tan A+\tan B+\tan C}\]
\[\cos\theta=\frac{\mathbf{a}\cdot\mathbf{b}}{|\mathbf{a}||\mathbf{b}|}\]
\[\sin\theta=\frac{\left|\overline{a}\times\overline{b}\right|}{\left|\overline{a}\right|\left|\overline{b}\right|}\]
Parallelepiped: Volume = [a b c]
Tetrahedron: \[\frac{1}{6}\] [a b c]
Theorems and Laws [8]
The resultant R of two vectors \[\vec P\] and \[\vec Q\] always lies between their difference and their sum:
For any two vectors \[\vec P\] and \[\vec Q\]:
The commutative law holds true for addition of vectors but not for subtraction.
For three vectors \[\vec P\], \[\vec Q\], and \[\vec R\]:
The associative law holds true for addition of vectors but not for subtraction.
If two vectors are represented in magnitude and direction by two sides of a triangle taken in order, then their sum is \[\overline{\mathrm{AC}}=\overline{\mathrm{AB}}+\overline{\mathrm{BC}}\]
If two co-initial vectors are represented in magnitude and direction by adjacent sides of a parallelogram, then their sum is represented in magnitude and direction by the diagonal of the parallelogram passing through the common point.
∴ \[\overline{\mathrm{AC}}=\overline{\mathrm{AB}}+\overline{\mathrm{BC}}\]
Two vectors can be added using either the Triangle Law or the Parallelogram Law. When two vectors \[\vec P\] and \[\vec Q\] are represented as two sides of a triangle (or two adjacent sides of a parallelogram), their resultant is represented by the third side (or the diagonal).
Using properties of scalar triple product, prove that `[(bara + barb, barb + barc, barc + bara)] = 2[(bara, barb, barc)]`.
L.H.S = `[(bara + barb, barb + barc, barc + bara)]`
= `(bara + barb) . [(barb + barc) xx (barc + bara)]`
= `(bara + barb) . [barb xx barc + barb xx bara + barc xx barc + barc xx bara]`
= `(bara + barb) . [barb xx barc + barb xx bara + barc xx bara] ...[∵ barc xx barc = bar0]`
= `bara . [(barb xx barc) + (barb xx bara) + (barc xx bara)] + barb . [(barb xx barc) + (barb xx bara) + (barc xx bara)]`
= `bara . (barb xx barc) + bara . (barb xx bara) + bara . (barc xx bara) + barb . (barb xx barc) + barb(barb xx bara) + barb(barc xx bara)`
= `[bara barb barc] + [bara barb bara] + [bara barc bara] + [barb barb barc] + [barb barb bara] + [barb barc bara]`
= `[bara barb barc] + 0 + 0 + 0 + 0 + [bara barb barc]`
= `2[bara barb barc]`
= R.H.S
Prove by vector method, that the angle subtended on semicircle is a right angle.
Let seg AB be a diameter of a circle with centre C and P be any point on the circle other than A and B.
Then ∠APB is an angle subtended on a semicircle.
Let `bar"AC" = bar"CB" = bar"a"` and `bar"CP" = bar"r"`
Then `|bar"a"| = |bar"r"|` ....(1)

`bar"AP" = bar"AC" + bar"CP"`
= `bar"a" + bar"r"`
= `bar"r" + bar"a"`
`bar"BP" = bar"BC" + bar"CP"`
= `- bar"CB" + bar"CP"`
= `- bar"a" + bar"r"`
∴ `bar"AP".bar"BP" = (bar"r" + bar"a").(bar"r" - bar"a")`
= `bar"r".bar"r" - bar"r".bar"a" + bar"a".bar"r" - bar"a".bar"a"`
= `|bar"r"|^2 - |bar"a"|^2`
= 0 ....`(∵ bar"r".bar"a" = bar"a".bar"r")`
∴ `bar"AP" ⊥ bar"BP"`
∴ ∠APB is a right angle.
Hence, the angle subtended on a semicircle is the right angle.
Consider the circle with the centre at O and AB is the diameter.
Let `bar(OA) = bar a, bar(OB) = bar b, bar(OC) = bar c`

∴ `|bar a| =|bar b| = |bar c| = r` ...(1)
and `bar a = -bar b` ...(2)
Consider:
`bar (AC) * bar (BC) = (bar c - bar a) * (bar c - bar b)`
= `(bar c - bar a) * (bar c + bar a)` ...[From (2)]
= `|bar c|^2 - |bar a|^2`
= r2 − r2 ...[From (1)]
= 0
∴ `bar(AC) * bar(BC) = 0`
∴ `bar(AC)` is perpendicular to `bar(BC)`
∴ ∠ACB = 90°
∴ Angle subtended on semi-circle is a right angle.
Key Points
| Type | Simple Meaning |
|---|---|
| Zero vector (0) | Zero magnitude, no direction |
| Unit vector | Magnitude = 1, shows direction only |
| Position vector (r) | Shows the position of a point from the origin |
| Equal vectors | Same magnitude and same direction |
| Negative vector | Same magnitude, opposite direction |
| Co-initial vectors | Start from the same point |
| Co-terminus vectors | End at the same point |
| Localised vector | Fixed at one position (cannot move) |
| Free vector | Can be moved parallel anywhere |
| Coplanar vectors | Lie in the same plane |
Coordinates on Axes
-
X-axis → (x,0,0)(x, 0, 0)(x,0,0)
-
Y-axis → (0,y,0)(0, y, 0)(0,y,0)
-
Z-axis → (0,0,z)(0, 0, z)(0,0,z)
Coordinates on Planes
-
XY-plane → (x,y,0)(x, y, 0)(x,y,0)
-
YZ-plane → (0,y,z)(0, y, z)(0,y,z)
-
ZX-plane → (x,0,z)(x, 0, z)(x,0,z)
Distance from Coordinate Planes
-
From XY-plane → ∣z∣
-
From YZ-plane → ∣x∣
-
From ZX-plane → ∣y∣
Distance from Origin
\[\sqrt{x^{2}+y^{2}+z^{2}}\]
Distance Between Two Points
\[d=\sqrt{(x_{2}-x_{1})^{2}+(y_{2}-y_{1})^{2}+(z_{2}-z_{1})^{2}}\]
Octants:
| Octants | I | II | III | IV | V | VI | VII | VIII |
|---|---|---|---|---|---|---|---|---|
| Coordinates | OXYZ | OX′YZ | OX′Y′Z | OXY′Z | OXYZ′ | OX′YZ′ | OX′Y′Z′ | OXY′Z′ |
| x | + | − | − | + | + | − | − | + |
| y | + | + | − | − | + | + | − | − |
| z | + | + | + | + | − | − | − | − |
Special Cases
-
Perpendicular → \[\overline{\mathrm{a}}\cdot\overline{\mathrm{b}}=0\]
-
Parallel → \[\mathbf{\overline{a}}\cdot\mathbf{\overline{b}}=\mathbf{ab}\]
Projection
-
Scalar= \[\frac{\mathbf{a}\cdot\mathbf{b}}{|\mathbf{b}|}\]
-
Vector \[=\frac{\mathbf{a}\cdot\mathbf{b}}{|\mathbf{b}|^{2}}\cdot\mathbf{b}\]
1. Conversion: From D.R → D.C: \[l=\frac{a}{\sqrt{a^2+b^2+c^2}},m=\frac{b}{\sqrt{a^2+b^2+c^2}},n=\frac{c}{\sqrt{a^2+b^2+c^2}}\]
2. Angle between two lines
If direction cosines: \[\cos\theta=l_1l_2+m_1m_2+n_1n_2\]
If direction ratios: \[\cos\theta=\frac{a_1a_2+b_1b_2+c_1c_2}{\sqrt{a_1^2+b_1^2+c_1^2}\sqrt{a_2^2+b_2^2+c_2^2}}\]
3. If A(x₁, y₁, z₁), B(x₂, y₂, z₂):
\[\mathrm{D.Rs}=(x_2-x_1,y_2-y_1,z_2-z_1)\]
4. \[l^2+m^2+n^2=1\]
1. Determinant form:
If \[\overline{\mathrm{a}}=\mathrm{a}_{1}\hat{\mathrm{i}}+\mathrm{a}_{2}\hat{\mathrm{j}}+\mathrm{a}_{3}\hat{\mathrm{k}}\] and \[\overline{\mathrm{b}}=\mathrm{b}_1\hat{\mathrm{i}}+\mathrm{b}_2\hat{\mathrm{j}}+\mathrm{b}_3\hat{\mathrm{k}}\], then
\[\overline{\mathrm{a}}\times\overline{\mathrm{b}}= \begin{vmatrix} \hat{\mathrm{i}} & \hat{\mathrm{j}} & \hat{\mathrm{k}} \\ \mathbf{a}_1 & \mathbf{a}_2 & \mathbf{a}_3 \\ \mathbf{b}_1 & \mathbf{b}_2 & \mathbf{b}_3 \end{vmatrix}\]
2. Condition for zero cross product:
a × b = 0 ⇒ vectors are parallel (or one is zero)
Concepts [15]
- Vector Algebra: Representation and Types
- Basic Concepts of Vector Algebra
- Collinearity and Coplanarity of Vectors
- Vector in Two Dimensions (2-D)
- Three Dimensional (3-D) Coordinate System
- Components of Vector in Algebra
- Position Vector of a Point P(X, Y, Z) in Space
- Component Form of a Position Vector
- Vector Joining Two Points in Algebra
- Section Formula in Vector Algebra
- Product of Two Vectors
- Direction Ratios, Direction Cosine & Direction Angles
- Vector Product of two vectors in Algebra (Cross Product)
- Scalar Triple Product
- Vector Triple Product
