Definitions [37]
"If an object continuously changes its position, it is said to be in motion."
A train or a moving vehicle on a road may travel in a straight line or in the same direction. This motion of an object is called linear motion. An object in linear motion shows displacement along a straight line."
"The motion of an object that does not move in a straight line is called ‘non-linear motion’."
Aristotle's statement: “An external force is required to keep a body in uniform motion”.
Define Newton’s second law of motion.
Newton’s second law of motion states that the rate of change of momentum is directly proportional to force applied and takes place in the direction of the force.
A frame of reference typically uses a coordinate system (axes and an origin) to track motion. If an object’s coordinates change with time in your chosen system, it is in motion relative to that frame.
OR
Frame of reference is a coordinate system used to measure the position and motion of objects.
An inertial frame of reference obeys Newton’s first law:
A body at rest stays at rest, and a body in motion continues at constant velocity, unless acted on by a net force.
OR
Inertial frame of reference isa co-ordinate system in which Newton's laws of motion hold good.
A non-inertial frame of reference is accelerating. In these frames, you may experience "fictitious" or pseudo-forces.
OR
A frame of reference in which Newton's laws of motion do not hold good is called non-inertial frame of reference.
A force is seen to act through direct contact of the objects or via one more object. Such a force is called 'Contact force.'
OR
The forces experienced by a body due to physical contact with another object, e.g., frictional force, normal force, are called contact forces.
A force is applied between two objects even if the two objects are not in contact; such a force is called a 'Non-contact force.'
OR
The forces experienced by a body without any physical contact with another object, e.g., gravitational force, electrostatic force, are called non-contact forces.
A force which arises due to physical interaction between objects is called a real force.
OR
Forces acting on an object due to interaction with another object, such as Normal force, Tension, Weight, Spring force, and Muscular force, which form action-reaction pairs and are all fundamental forces of nature, are called Real Forces.
A force which does not arise from any physical interaction but appears when observing motion from a non-inertial (accelerated) frame of reference, arising due to the acceleration of the observer's frame, is called a pseudo force.
Energy possessed by an object on account of its position in a force field. It changes as the work is done by or against a conservative force.
A force is said to be a conservative force if the work done by or against it is independent of the actual path chosen and depends only on the initial and final positions of the object.
OR
If work done by or against a force is independent of the actual path, the force is said to be a conservative force.
A force that does not follow the conservative force rule, where the work done by or against it depends on the actual path taken.
OR
If work done by or against a force is dependent of the actual path, the force is said to be a non- conservative force.
“The total momentum of an isolated system is conserved during any interaction.”
A diagram that refers to forces acting on only one body at a time, along with its acceleration, is called a Free Body Diagram (FBD).
Define coefficient of restitution.
For two colliding bodies, the negative of the ratio of the relative velocity of separation to the relative velocity of approach is called the coefficient of restitution.
A collision as a process where "several objects come together, interact (exert forces on each other) and scatter in different directions."
OR
An event where two or more bodies exert forces on each other in a relatively short time is called a collision.
OR
The interaction between two bodies during a very small duration in which they exert relatively large forces on each other, and during which momentum or kinetic energy is transferred from one object to another, is called Collision.
A collision in which both linear momentum and kinetic energy are conserved is called an elastic collision.
A collision in which linear momentum is conserved but kinetic energy is not conserved is called an inelastic collision.
The ratio of the relative velocity of separation to the relative velocity of approach between two colliding objects is called the Coefficient of Restitution.
A collision where the kinetic energy of the entire system is conserved during the collision (along with the linear momentum).
OR
The collision in which the total kinetic energy before and after the collision remains the same, and both momentum and kinetic energy are conserved, is called Elastic Collision.
A collision where there is a loss in kinetic energy during the collision, but linear momentum is conserved.
OR
A collision in which the total kinetic energy does not remain constant after the collision is called an inelastic collision.
The exact definition from the source is "If colliding bodies join together after collision, it is said to be a perfectly inelastic collision."
OR
A collision in which linear momentum is conserved, kinetic energy is not conserved, and the colliding bodies stick together after collision is called a perfectly inelastic collision.
OR
A perfectly inelastic, head-on collision of two bodies of masses m₁ and m₂ with respective initial velocities u₁ and u₂, where they move jointly after the collision, i.e., their final velocity is the same.
The negative of the ratio of the relative velocity of separation to the relative velocity of approach.
Mathematically: e = -\[\frac{\text{relative velocity of separation}}{\text{relative velocity of approach}}\]
OR
The ratio of the velocity of separation (after collision) to the velocity of approach (before collision), expressed as e = \[\frac {\text {Velocity of separation}}{\text {Velocity of approache}}\], is called the coefficient of restitution.
A collision in two dimensions (oblique collision) is defined as: a collision where the direction of at least one initial velocity is NOT along the line of impact, requiring analysis using two mutually perpendicular directions—the line of impact and the common tangent at the point of contact.
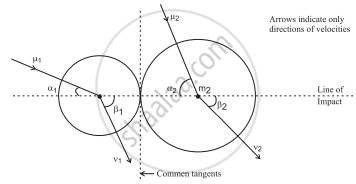
Oblique or non-head-on collision.
The quantity ‘change in momentum’ is separately named as the Impulse of the force.
OR
The quantity change in momentum is called impulse.
OR
Impulse
The product of a large force applied on a body for a very short interval of time, which produces a finite change in the momentum of the body, with SI unit Ns (or kg-ms⁻¹) and dimension [MLT⁻¹], is called impulse.
The rotational analogue of a force, defined as the quantity that represents the rotational ability of a force. It depends upon the magnitude of the force, the point of application of the force, and the angle between the direction of the force and the line joining the axis of rotation with the point of application.
OR
A turning effect of the force about the axis of rotation is called torque.
A couple is a pair of forces that satisfy all of the following:
- They are equal in magnitude (same strength)
- They are opposite in direction
- Their lines of action do not coincide (they act along different straight paths)
Because of these properties, a couple produces a pure rotation (turning) effect and no net translation (no sliding) of the object.
Mechanical equilibrium occurs when the combined effect of all forces on an object equals zero, resulting in constant velocity or rest.
OR
The state in which the momentum of a system is constant in the absence of an external unbalanced force is called mechanical equilibrium.
The state of equilibrium in which the potential energy of the system is constant over a plane and remains same at any position is called neutral equilibrium.
OR
The equilibrium in which the potential energy remains constant even if the body moves to neighbouring points, where \[\frac {d^2U}{dr^2}\] = 0, is called Neutral Equilibrium.
The state of equilibrium in which the potential energy of the system is at its local maximum is called unstable equilibrium.
OR
The equilibrium in which the potential energy at the equilibrium position is maximum as compared to other positions, where \[\frac {d^2U}{dr^2}\] is negative, is called Unstable Equilibrium.
The state of equilibrium in which the potential energy of the system is at its local minimum is called stable equilibrium.
OR
The equilibrium in which the potential energy at the equilibrium position is minimum as compared to its neighbouring points, where \[\frac {d^2U}{dr^2}\] is positive, is called Stable Equilibrium.
"The centre of mass is a point about which the summation of moments of masses in the system is zero."
OR
A point at which the total mass (MM) of a finite body is supposed to be concentrated, and about which the summation of moments of masses in the system is zero, is called the centre of mass.
OR
The centre of mass is a hypothetical point at which the entire mass of the body can be assumed to be concentrated.
The Centre of Gravity (c.g.) of a body is the point around which the resultant torque due to the force of gravity on the body is zero.
or
The centre of gravity (C.G.) of a body is the point about which the algebraic sum of moments of the weights of all the particles constituting the body is zero. The entire weight of the body can be considered to act at this point, howsoever the body is placed.
OR
The point about which the resultant torque due to force of gravity on the body is zero is called the centre of gravity.
The centre of gravity is an imaginary location where the body’s whole weight is assumed to be concentrated.
Formulae [19]
\[\vec F\] = m \[\frac{d\vec{\mathrm{v}}}{dt}\] = m\[\vec a\] ... (for constant mass)
Thus, if \[\vec F\] = 0, \[\vec v\] is constant. Hence, if there is no force, velocity will not change. This is nothing but Newton's first law of motion.
General Form: \[\vec F\] =\[\frac{d\vec{p}}{dt}\]
For Constant Mass: \[\vec F\] = m\[\vec a\]
Momentum: \[\vec p\] = m\[\vec v\]
\[\vec{F}=\frac{d\vec{p}}{dt}=\frac{d\left(m\vec{\mathrm{v}}\right)}{dt}\]
Pseudo Force: Fpseudo = −m\[\vec a\]
Where:
- m = mass of the object
- \[\vec a\] = acceleration of the non-inertial reference frame
- The negative sign indicates the force is opposite to the acceleration direction
W = \[\int_{\mathrm{b}}^{\mathrm{a}}\vec{\mathrm{F}}.\overline{\mathrm{ds}}=\int_{\mathrm{b}}^{\mathrm{a}}\mathrm{F}\mathrm{ds}\cos\theta\]
\[\vec p\] = m\[\vec v\]
Where:
- \[\sum\vec{p}_{initial}\] = total initial momentum of all objects
- \[\sum\vec{p}_{final}\] = total final momentum of all objects
Where:
- The lost kinetic energy is due to internal friction or vibrational motion of atoms, causing a heating effect
- Linear momentum is still conserved: \[\sum\vec{p}_{initial}\] = \[\sum\vec{p}_{final}\]
Where:
- ∑KEinitial = total initial kinetic energy
- ∑KEfinal = total final kinetic energy
e = \[-\frac{v_{s}}{u_{a}}=-\frac{v_{2}-v_{1}}{u_{2}-u_{1}}=\frac{v_{1}-v_{2}}{u_{2}-u_{1}}\]
\[\mathrm{v}_{1}=\mathrm{u}_{1}\lfloor\frac{\mathrm{m}_{1}-\mathrm{m}_{2}}{\mathrm{m}_{1}+\mathrm{m}_{2}}\rfloor+\mathrm{u}_{2}\lfloor\frac{2\mathrm{m}_{2}}{\mathrm{m}_{1}+\mathrm{m}_{2}}\rfloor\]
\[\mathbf{v}_{2}=\mathbf{u}_{1}\left[\frac{2\mathbf{m}_{1}}{\mathbf{m}_{1}+\mathbf{m}_{2}}\right]+\mathbf{u}_{2}\left[\frac{\mathbf{m}_{2}-\mathbf{m}_{1}}{\mathbf{m}_{1}+\mathbf{m}_{2}}\right]\]
i. Final velocities:
\[\mathrm{v}_{1}=\frac{\mathrm{m}_{1}-\mathrm{em}_{2}}{\mathrm{m}_{1}+\mathrm{m}_{2}}\mathrm{u}_{1}+\frac{(1+\mathrm{e})\mathrm{m}_{2}}{\mathrm{m}_{1}+\mathrm{m}_{2}}\mathrm{u}_{2}\]
\[\mathrm{v}_2=\frac{\mathrm{m}_1-\mathrm{em}_2}{\mathrm{m}_1+\mathrm{m}_2}\mathrm{~u}_1+\frac{(1+\mathrm{e})\mathrm{m}_2}{\mathrm{m}_1+\mathrm{m}_2}\mathrm{~u}_2\]
ii. Loss in kinetic energy:
\[\Delta\mathrm{K}=\frac{\left(1-\mathrm{e}^2\right)\mathrm{m}_1\mathrm{m}_2}{2(\mathrm{m}_1+\mathrm{m}_2)}(\mathrm{u}_1-\mathrm{u}_2)^2\]
\[{\vec{\mathrm{J}}=\vec{\mathrm{F}}t}=\mathrm{m}(\vec{\mathrm{v}}-\vec{\mathrm{u}})\]
Impulse (J) = F × Δt = Δp = m(v - u)
Where:
- J = Impulse
- F = Force applied
- Δt = Time interval for which the force acts
- Δp = Change in momentum
- m = Mass of the object
- v = Final velocity
- u = Initial velocity
Vector Form
\[\vec τ\] = \[\vec r\] × \[\vec F\]
Here:
- \[\vec τ\] = Torque
- \[\vec r\] = Position vector of the point of application of force from the axis of rotation
- \[\vec F\] = applied force
Scalar (Magnitude) Form
τ = r F sin θ
Where:
- r = perpendicular distance from the axis of rotation
- F = Magnitude of the force
- θ = The smaller angle between the directions of \[\vec r\] and \[\vec F\]
\[\vec τ\] = \[\vec r_{12}\] × \[\vec F_1\] = \[\vec r_{21}\] × \[\vec F_2\]
i. For n particle system,
Position vector \[\vec r_{C.M.}\] = \[\frac{\sum_{i}^{n}m_{i}\overset{\to}{\operatorname*{r_{i}}}}{\sum_{i}^{n}m_{i}}=\frac{\sum_{i}^{n}m_{i}\overset{\to}{\operatorname*{r_{i}}}}{M}\]
ii. For continuous distribution,
Positive Vector \[\vec r_{C.M}\] = \[\frac {\int{\vec r}\mathrm dm}{M}\]
\[\mathbf{v}_{\mathrm{cm}}=\frac{\sum_{1}^{n}\mathbf{m}_{\mathrm{i}}\mathbf{v}_{\mathrm{i}}}{\sum_{1}^{n}\mathbf{m}_{\mathrm{i}}}=\frac{\sum_{1}^{n}\mathbf{m}_{\mathrm{i}}\mathbf{v}_{\mathrm{i}}}{\mathbf{M}}\]
\[\vec a_{cm}\] = \[\frac{\sum_{1}^{n}m_{i}\overset{\to}{\operatorname*{\operatorname*{a}_{i}}}}{\sum_{1}^{n}m_{i}}=\frac{\sum_{1}^{n}m_{i}\overset{\to}{\operatorname*{a}}_{i}}{M}\]
Theorems and Laws [5]
Statement:
Every inanimate object continues to be in a state of rest or of uniform unaccelerated motion along a straight line, unless it is acted upon by an external, unbalanced force.
Importance:
- It shows the equivalence between the state of rest and the state of uniform motion along a straight line — the distinction lies only in the choice of frame of reference.
- It defines force as a physical entity that brings about a change in the state of motion or rest of an object.
- It defines inertia as a fundamental and inherent property of every physical body by virtue of which it resists any change in its state of rest or uniform motion along a straight line.
Statement:
The rate of change of linear momentum of a rigid body is directly proportional to the applied (external unbalanced) force and takes place in the direction of force.
F = Δp = m\[\frac {dv}{dt}\] = ma
Importance:
- It provides a mathematical formulation for the quantitative measure of force: F = \[\frac {Δp}{Δt}\] = ma.
- It defines momentum as the product of mass and velocity: p = mv.
- Aristotle's fallacy is overcome by establishing that it is the resultant unbalanced force — not force itself — that is required to maintain a change in the state of motion.
Statement:
To every action (force) there is always an equal and opposite reaction (force).
Importance:
- It defines action and reaction as a pair of equal and opposite forces acting along the same line — whenever one object exerts a force on another, the second object exerts an equal and opposite force on the first.
- Action and reaction forces always act on different objects and therefore never cancel each other out.
Change in kinetic energy of the body = Work done on the body by the net force
Kf - Ki = W
Following points are very useful while calculating the work done by resistive force.
- If a particle of mass m is moving with velocity v. This particle is stopped by some resistive force, then the work done by the resistive force, W = -1/2 mv²
- Decrease in the gravitational potential energy = Increase in the kinetic energy + Work done against non-conservative forces
Statement: The impulse of a force equals the change in momentum of the body.
-
When a force acts from time t1 to t2:
- Impulse from a force-time graph = Area under the F-t graph.
- For constant force: J = Ft
Key Points
- Newton's First Law states that a body at rest or in uniform motion stays that way unless an external unbalanced force acts on it.
- The law explains inertia, which is an object's resistance to changing its state of motion on its own.
- The 'state of rest' and 'state of uniform motion' are considered equivalent; both require a net unbalanced force to change.
- Force is defined by the law as the entity that changes a body’s state of motion.
- A balanced force results in a net force of zero, meaning no acceleration.
- An unbalanced force results in a net force that causes acceleration and changes the state of motion.
- Inertia is quantitatively measured by the object's mass (inertial mass).
- Gravitational force — Force of attraction between any two masses; infinite range; weakest force (strength 10−39); acts on all objects in the universe.
- Electromagnetic force — Attractive or repulsive force between charged particles; infinite range; strength 10−2; acts only among charged particles.
- Strong nuclear force — Binds protons and neutrons together in the nucleus; short range (10−15 m); strongest of all four forces (strength = 1).
- Weak nuclear force — Responsible for radioactive decay of atoms; very short sub-nuclear range (10−16 m); strength 10−13; acts among electrons, neutrinos, and subatomic particles.
- Work done by a constant force is given by W = \[\vec F\] . \[\vec s\] = F s cos θ; for infinitesimal displacement, dW = \[\vec F\] . d\[\vec x\].
- For a variable force, the standard formula is not applicable; work done is calculated using W = \[\int_{s_{1}}^{s_{2}}\vec{F}\cdot d\vec{s}.\]
- The area under the force-displacement graph represents the work done; for linearly variable force, W = Area APQB.
- Conservative force (e.g., gravity) — work done is path independent; non-conservative force (e.g., friction) — work done is path dependent.
- Mechanical energy is conserved under conservative forces only; Wconservative = −ΔU and Wnon-conservative = ΔKE + ΔPE.
- In a pulley system with M1 > M2, acceleration a = \[\left(\frac{M_1-M_2}{M_1+M_2}\right)\]g and tension T = \[\begin{pmatrix} \frac{2M_1M_2}{M_1+M_2} \end{pmatrix}\]g. Always place the heavier mass as M1.
- The total momentum of an isolated system is always conserved — if no external force acts, p remains constant \[\left(\frac{d\mathbf{p}}{dt}=0\right)\].
- Momentum is conserved only when net external force = 0; internal forces between bodies within the system do not change total momentum.
- A Free Body Diagram (FBD) shows forces and acceleration on one body at a time — in a pulley system, tension T acts up and weight Mg acts down on each mass separately.
- In an Atwood machine, both masses share the same tension and magnitude of acceleration — M1 moves down, M2 moves up simultaneously.
- The weight of a body acts through a single point called the centre of gravity (C.G.), where the sum of moments of all particles' weights is zero.
- The position of the C.G. depends on the shape and mass distribution of the body and changes if the body is deformed.
- The C.G. may lie outside the material of the body (e.g., a ring or hollow sphere).
- A body balances when supported exactly at its centre of gravity, as seen in a metre rule or square lamina.
- The C.G. of an irregular lamina can be found by suspending it from multiple points and tracing the intersection of plumb line paths.
Concepts [34]
- Fundamental Principles of Motion and Mechanics
- Types of Motion
- Aristotle’s Fallacy
- Newton’s Laws of Motion
- Newton's First Law of Motion
- Newton’s Second Law of Motion
- Newton's Third Law of Motion
- Inertial and Non-inertial Frames of Reference
- Types of Forces>Fundamental Forces in Nature
- Types of Forces>Contact and Non-Contact Forces
- Types of Forces>Real and Pseudo Forces
- Types of Forces>Conservative and Non-Conservative Forces
- Types of Forces>Work Done by a Variable Force
- Work Energy Theorem
- Principle of Conservation of Linear Momentum
- Collisions
- Elastic and Inelastic Collisions
- Perfectly Inelastic Collision
- Coefficient of Restitution e
- Expressions for Final Velocities in Elastic Head-On Collision
- Loss of Kinetic Energy in Perfectly Inelastic Head-On Collision
- Collision in Two Dimensions
- Impulse of a Force
- Necessity of Defining Impulse
- Rotational Analogue of a Force: Moment of a Force Or Torque
- Couple and Its Torque
- Proof of Independence of the Axis of Rotation
- Mechanical Equilibrium
- States of Equilibrium
- Centre of Mass>Mathematical Understanding of Centre of Mass
- Centre of Mass>Velocity of Centre of Mass
- Centre of Mass>Acceleration of Centre of Mass
- Centre of Mass>Characteristics of Centre of Mass
- Centre of Gravity
