- \[\vec v_A\] = Velocity of object A
- \[\vec v_B\] = Velocity of object B
- \[\vec v_{AB}\] = Velocity of A relative to B
- The subscripts indicate the order: for \[\vec v_{BA}\], B is the observer, A is referenced.
Definitions [50]
Definition: Motion
"Motion is a change in the position of an object with time."
Definition: Rectilinear Motion
The motion of an object in which the position of a particle varies only in terms of distance along a straight line is called Rectilinear Motion.
Define the following term:
Free fall
A path of free fall is the term used to describe the movement of an object solely under the influence of gravity.
Definition: Displacement
The shortest straight line distance between an object's initial and final positions, represented as Δ\[\vec x\] = \[\vec x_2\] − \[\vec x_1\], is called displacement.
OR
The shortest distance from the initial to the final position of a body undergoing motion — a vector quantity whose direction is always from initial to final position, which does not depend on path but only on initial and final positions, and may be positive, negative, or zero — is called displacement.
Definition: Distance
The total length of the actual path covered by a body in travelling from its initial to its final position — a scalar quantity that always depends on the path followed, can never be negative, and has SI unit metre (m) — is called distance.
Definition: Path Length
The total distance travelled by an object along its actual path, regardless of the direction of motion, is called path length.
Definition: Average Velocity
"Average velocity is defined as the displacement of the object during the time interval over which average velocity is being calculated, divided by that time interval."
OR
The total displacement Δ\[\vec x\] of an object divided by the total time interval Δt over which that displacement occurs is called average velocity.
OR
The ratio of total displacement to the total time taken by the body is called average velocity.
Definition: Non-Uniform Speed (Variable Speed)
The speed at which an object covers unequal distances in equal intervals of time is called non-uniform speed or variable speed.
Definition: Uniform Speed
The speed at which an object covers equal distances in equal intervals of time is called uniform speed.
Definition: Average Speed
"total path length travelled during the time interval over which average speed is being calculated, divided by that time interval."
OR
The total distance travelled by an object divided by the total time taken for its motion is called average speed.
OR
The ratio of total distance travelled by the body to the total time taken to cover such distance is called average speed.
Definition: Instantaneous Velocity
Instantaneous velocity of an object is its velocity at a given instant of time. It is defined as the limiting value of the average velocity of the object over a small time interval (Δt) around t when the value of the time interval (Δt) goes to zero.
OR
The limiting value of the average velocity of an object over a small time interval 'Δt' around time t when the value of the time interval goes to zero is called instantaneous velocity.
Definition: Instantaneous Speed
Instantaneous speed is simply the speed of an object at a single, specific moment in time (t).
OR
The limiting value of the average speed of an object over a small time interval 'Δt' around time tt when the value of the time interval goes to zero is called instantaneous speed.
Definition: Acceleration
Acceleration is defined as the rate of change of velocity with time.
OR
The rate of change of velocity with respect to time — a vector quantity whose direction is the same as that of change in velocity, with dimensional formula [M0L1T−2] and SI unit m/s² — is called acceleration.
Definition: Average Acceleration
The change in velocity of an object divided by the total time required for that change in velocity is called average acceleration.
OR
The ratio of total change in velocity to the total time taken by the particle when the change in velocity results is called average acceleration.
Definition: Retardation / Deceleration
The negative acceleration (i.e., uniformly retarded motion where a < 0) that shows slowing down or deceleration of a particle is called retardation.
Definition: Instantaneous Acceleration
The limiting value of the average acceleration of an object over a small time interval 'Δt' around time tt when the value of the time interval goes to zero is called instantaneous acceleration.
OR
The acceleration of a particle at a particular instant of time — defined as the limit of average acceleration as time interval Δt→0 — is called instantaneous acceleration.
Definition: Uniform Acceleration
The acceleration when the magnitude and direction of the acceleration remains constant during motion of an object is called uniform acceleration.
Definition: Gravitational Acceleration
The acceleration on an object which results due to gravity — where every small body accelerates in a gravitational field at a similar rate towards the centre of mass, irrespective of the mass of the body — is called gravitational acceleration.
Definition: Non-Uniform Acceleration
The acceleration when either magnitude or direction or both change during motion is called non-uniform acceleration.
Definition: Relative Velocity
Relative velocity is the velocity of one object as measured from another moving object's perspective.
Let:
- vA = velocity of object A (relative to ground/Earth)
- vB = velocity of object B (relative to ground/Earth)
- vAB = velocity of A relative to B (what B observes about A's motion)
OR
The velocity of one object as observed by another object is called relative velocity.
Definition: Motion in a Plane
The motion of an object in which its position changes along two mutually perpendicular axes (X and Y) simultaneously, such that it requires two coordinates to describe its position at any given instant, is called Motion in a Plane (Two-Dimensional Motion).
OR
The motion of a body that takes place along two different directions (or co-ordinate axes) with respect to origin at the same time is called two dimensional motion or motion in a plane.
Definition: Average Velocity in Two-Dimensional Motion
Total displacement divided by elapsed time.
Definition: Instantaneous Velocity in Two-Dimensional Motion
The velocity at an exact moment—drawn as the tangent to the path.
Definition: Instantaneous Acceleration in plane
Instantaneous Acceleration (\[\vec a\]): The acceleration of an object at a specific instant of time. It is the limit of average acceleration as the time interval approaches zero, or the rate of change of velocity with respect to time.
Definition: Average acceleration in plane
Average Acceleration (\[\vec a_{av}\]): The change in velocity divided by the time interval over which that change occurs. It represents the acceleration over a specific time period between two moments.
Definition: Relative Velocity
The velocity of an object with respect to another object — i.e., the velocity with which an object appears to move to an observer which is placed on the other object that moves along with it — is called relative velocity.
Definition: Projection Angle
The direction of projection with respect to the horizon which determines the shape of trajectory (vertical → vertical, oblique → parabolic, horizontal → half parabolic) is called the projection angle.
Definition: Projectile
An object in flight after being thrown with some velocity that follows a curved path under the action of gravity is called a projectile.
OR
A body in free fall which is subjected to the force of gravity and air resistance only — which refers to the motion of bodies flung into the air — is called a projectile.
Definition: Time of Flight
The total time for which the projectile remains in the air — from the moment it is projected to the moment it returns to the same level — is called the time of flight (T).
Definition: Time of Descent
The time taken by the projectile to travel from the maximum height back to the ground is called the time of descent (tD).
Definition: Horizontal Range
The total maximum horizontal distance travelled by a projectile from the point of projection to the point where it hits the ground is called the horizontal range (R).
Definition: Maximum Height
The maximum vertical height reached by the projectile — i.e., the distance travelled along the vertical (y) direction up to the highest point — is called the maximum height (H).
Definition: Projection Speed
The magnitude of projection velocity — which, with a fixed projection angle, shows the length of trajectory or range — is called the projection speed.
Definition: Time of Ascent
The time taken by the projectile to travel from the point of projection to the maximum height is called the time of ascent (tA).
Definition: Trajectory
The path followed by a projectile is called its trajectory.
Definition: Centripetal Acceleration
The acceleration acting on an object undergoing uniform circular motion, which always acts on the object along the radius towards the centre of the circular path, is called centripetal acceleration.
Definition: Angular Velocity (ω)
The rate of change of angular displacement of a body undergoing circular motion is called angular velocity.
Definition: Radial (Centripetal) Acceleration
The component of acceleration directed towards the centre of the circular path is called centripetal acceleration (or radial acceleration).
Definition: Angular Acceleration (α)
The rate of change of angular velocity of a body is called angular acceleration.
Definition: Centripetal Force
The force directed towards the centre along the radius, required to keep a body moving along a circular path at constant speed, is called centripetal force.
Definition: Uniform Circular Motion
When a particle moves with a constant speed in a circular path, its motion is said to be uniform circular motion.
OR
The motion of a body moving with constant speed along a circular path is called uniform circular motion.
OR
The motion of a body moving with constant speed along a circular path, where the velocity is always tangential to the circular path and remains constant in magnitude, is called uniform circular motion.
Define Uniform circular motion.
When a particle moves with a constant speed in a circular path, its motion is said to be the uniform circular motion.
Define angular velocity.
Angular velocity of a particle is the rate of change of angular displacement.
Definition: Angular Displacement
The angle traced out by the radius vector at the centre of the circular path in a given time, expressed as Δθ = θ2 − θ1, is called angular displacement.
Definition: Time Period
This is the time it takes for the object to complete one full lap (one revolution). Its unit is seconds (s).
OR
The time taken by a particle performing uniform circular motion to complete one revolution is called the time period.
Definition: Radius Vector
It is a vector that points from the center of the circle (the origin) out to the position of the particle.
- Magnitude: Its length is simply the radius, r.
- Key Insight: As the object moves in UCM, its radius vector sweeps out equal angles in equal amounts of time.
Definition: Angular Speed
Angular speed (ω) is the angle described by the radius vector per unit time.
Definition: Linear Speed
This is the familiar speed (distance/time). In one period (T), the distance travelled is the circumference of the circle, 2πr.
Definition: Centripetal Force
A force that acts on any object moving along a circle and is directed towards the centre of the circle. When this force stops acting, the object flies off along a straight line (tangent to the circle) in the direction of its velocity at that instant.
Definition: Conical Pendulum
A simple pendulum which is given such a motion that the bob describes a horizontal circle and the string makes a constant angle with the vertical, such that the string describes a cone, is called a conical pendulum.
Formulae [27]
Formula: Displacement
If the position at time t₁ is x₁ and at time t₂ is x₂, then
Displacement \[\vec s\] = \[\vec x_2\] - \[\vec x_1\]
In vector form:
\[\Delta\bar{r}=(x_2-x_1)\hat{i}+(y_2-y_1)\hat{j}+(z_2-z_1)\hat{k}\]
Formula: Velocity
Velocity = \[\frac {\text {Displacement}}{\text {Time interval}}\]
Formula: Average Velocity
\[\vec{v}_{\mathrm{av}}=\frac{\vec{x}_2-\vec{x}_1}{t_2-t_1}\]
- vav : average velocity.
- x2 : final position vector.
- x1 : initial position vector.
- t2 : final time
- t1 : initial time
Dimensions: [L1M0T−1]
OR
Average Velocity: \[\vec V_{avg}\] = \[\frac {\text {Displacement}}{\text {Time interval}}\] = \[\frac {x_2-x_1}{t_2-t_1}\] = \[\frac {Δ\vec x}{Δt}\]
Formula: Average Speed
Average Speed = vav = \[\frac{\text{path length}}{\text{time interval}}\]
OR
Average speed = \[\frac {\text {Total path length}}{\text {Total time int erval}}\] = \[\frac {\text {Total distance}}{\text {Total time}}\] = \[\frac {x}{t}\]
Formula: Speed
Speed = \[\frac {Distance covered}{t}\] = \[\frac {s}{t}\]
Formula: Instantaneous velocity
\[\vec{\mathrm{v}}=\lim_{\Delta t\to0}\left(\frac{\Delta\vec{x}}{\Delta t}\right)=\frac{d\vec{x}}{dt}\]
Formula: Instantaneous Speed
To calculate instantaneous speed, we look at the average speed () over a very, very short time interval (Δt). It is defined as the limiting value of the average speed as the time interval (Δt) approaches zero.
Instantaneous Speed = \[\operatorname*{lim}_{\Delta t\to0}\frac{\mathrm{Distance}}{\Delta t}\]
OR
\[\vec{\mathbf{v}}=\lim_{\Delta t\to0}\frac{\Delta\vec{\mathbf{x}}}{\Delta t}=\frac{d\vec{\mathbf{x}}}{dt}\]
Formula: Instantaneous Acceleration
Instantaneous acceleration is the limiting value of average acceleration when the time interval approaches zero:
\[\vec{a}=\lim_{\Delta t\to0}\frac{\Delta\vec{v}}{\Delta t}=\frac{d\vec{v}}{dt}\]
where:
- \[\vec a\] = instantaneous acceleration
- \[d\vec{v}\] = infinitesimal change in velocity
- dt = infinitesimal change in time
The instantaneous acceleration at a given time equals the slope of the tangent to the velocity versus time curve at that time.
Formula: Average Acceleration
Average acceleration is calculated when an object has velocities \[\vec v_1\] and \[\vec v_2\] at times t1 and t2:
\[\vec{a}=\frac{\vec{v_2}-\vec{v_1}}{t_2-t_1}\]
where:
- \[\vec a\] = average acceleration
- \[\vec v_1\] = velocity at time t1
- \[\vec v_2\] = velocity at time t2
OR
Average acceleration: \[\vec a_{av}=\frac {\vec v_2-\vec v_1}{t_{2}-t_{1}}=\frac {\Delta\vec v}{\Delta t}\]
Formula: Relative Velocity
vAB = vA - vB
vBA = vB - vA = -vAB
Key relationship: vAB = -vBA
Formula: Position Vector in x-y Plane
\[\vec{r}=x\hat{i}+y\hat{j}\]
Formula: Displacement
\[\Delta\vec{r}=\vec{r^{\prime}}-\vec{r}=(x^{\prime}-x)\hat{i}+(y^{\prime}-y)\hat{j}=\Delta x\hat{i}+\Delta y\hat{j}\]
Formula: Average Velocity
\[\bar{v}=\frac{\Delta\vec{r}}{\Delta t}\]
Formula: Instantaneous Velocity
\[\bar{v}_{inst}=\lim_{\Delta t\to0}\frac{\Delta\vec{r}}{\Delta t}=\frac{d\vec{r}}{dt}\]
\[\vec{v}=v_x\hat{i}+v_y\hat{j}+v_z\hat{k}\],
where vx = \[\frac {dx}{dt}\], vy = \[\frac {dy}{dt}\], vz = \[\frac {dz}{dt}\]
Fomula: Instantaneous Acceleration
\[a_{inst}=\lim_{\Delta t\to0}\frac{\Delta\vec{v}}{\Delta t}=\frac{d\vec{v}}{dt}\]
\[\vec{a}=a_x\hat{i}+a_y\hat{j}+a_z\hat{k}\],
where ax = \[\frac {dv_x}{dt}\], ay = \[\frac {dv_y}{dt}\], az = \[\frac {dv_z}{dt}\]
Formula: Average Velocity in Two-Dimensional Motion
\[\vec{v}_\mathrm{avg}=\frac{\Delta\vec{r}}{\Delta t}=\left(\frac{x_2-x_1}{t_2-t_1}\right)\hat{i}+\left(\frac{y_2-y_1}{t_2-t_1}\right)\hat{j}\]
Components:
- vavg,x = \[\frac{x_2-x_1}{t_2-t_1}\]
- vavg,y = \[\frac{y_2-y_1}{t_2-t_1}\]
Magnitude & Direction:
\[v_{\mathrm{avg}}=\sqrt{v_x^2+v_y^2},\quad\theta=\tan^{-1}\left(\frac{v_y}{v_x}\right)\]
Formula: Instantaneous Velocity in Two-Dimensional Motion
\[\vec{v}=\lim_{\Delta t\to0}\frac{\Delta\vec{r}}{\Delta t}=\frac{d\vec{r}}{dt}=\frac{dx}{dt}\hat{i}+\frac{dy}{dt}\hat{j}\]
Magnitude & Direction:
v = \[\sqrt{\left(\frac{dx}{dt}\right)^2+\left(\frac{dy}{dt}\right)^2},\quad\theta=\tan^{-1}\left(\frac{dy/dt}{dx/dt}\right)\]
Curve of motion with a tangent line at P, and component arrows showing vx and vy.)
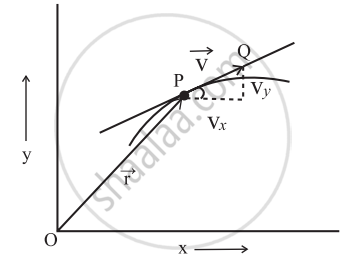
Instantaneous velocity
Formula: Average Acceleration in Two-Dimensional plane
The average acceleration between t1 and t2 is
\[\vec{a}_{av}=\frac{\vec{v_2}-\vec{v_1}}{t_2-t_1}\]
That means: “Average acceleration = Change in velocity ÷ Time interval”
In component form:
\[\vec{a}_{av}=\left(\frac{v_{2x}-v_{1x}}{t_2-t_1}\right)\hat{i}+\left(\frac{v_{2y}-v_{1y}}{t_2-t_1}\right)\hat{j}\]
Magnitude:
\[a_{av}=\sqrt{(a_{av,x})^2+(a_{av,y})^2}\]
Direction:
\[\tan\theta=\frac{a_{av,y}}{a_{av,x}}\]
Formula: Instantaneous Acceleration in Two-Dimensional plane
When the time interval becomes extremely small (approaches zero), the average acceleration becomes the instantaneous acceleration — i.e., acceleration at a specific instant.
\[\vec{a}=\lim_{\Delta t\to0}\frac{\Delta\vec{v}}{\Delta t}=\frac{d\vec{v}}{dt}\]
Or in components:
\[\vec{a}=\left(\frac{dv_x}{dt}\right)\hat{i}+\left(\frac{dv_y}{dt}\right)\hat{j}\]
Since \[v_x=\frac{dx}{dt}\mathrm{~and~}v_y=\frac{dy}{dt}\mathrm{:}\]
\[\vec{a}=\left(\frac{d^2x}{dt^2}\right)\hat{i}+\left(\frac{d^2y}{dt^2}\right)\hat{j}\]
Magnitude:
a = \[\sqrt{\left(\frac{d^2x}{dt^2}\right)^2+\left(\frac{d^2y}{dt^2}\right)^2}\]
Direction:
\[\tan\theta=\frac{dv_y/dt}{dv_x/dt}=\frac{dv_y}{dv_x}\]
Formula: Velocity of B relative to A
\[\vec{v}_{BA}=\vec{v}_B-\vec{v}_A\]
where:
Formula: Velocity of A relative to B
\[\vec{v}_{AB}=\vec{v}_A-\vec{v}_B\]
where:
Formula: Projectile Motion
| Quantity | Formula |
|---|---|
| Position after time t | x = (u cos θ)t, y = (u sin θ)t − \[\frac {1}{2}\]gt2 |
| Equation of trajectory | y = x tan θ − \[\frac {g}{2u^2 cos^2 θ}\] ⋅ x2 |
| Maximum height | H = \[\frac {u^2 sin^2 θ}{2g}\] |
| Time of flight | T = \[\frac {2u sin θ}{g}\] |
| Horizontal range | R = \[\frac {u^2 sin 2θ}{g}\] |
| Maximum range | Rmax = \[\frac {u^2}{g}\] at θ = 45° |
| Velocity after time ttt | vx = u cos θ, vy = u sin θ − gt |
| Speed | v = \[\sqrt {v_x^2+v_y^2}\] |
Formula: Angular Speed
ω = \[\frac {Angle Swept}{Time}\] (Unit: radian/s)
Formula: Linear Speed
v = \[\frac {Distance}{Time}\] = \[\frac {2πr}{T}\] (Unit: m/s)
Formula: Centripetal Force
F = \[m\omega^{2}r=\frac{mv^{2}}{r}\] = mωv
where:
- F = Centripetal force (in Newtons)
- m = Mass of the object (in kg)
- ω = Angular speed (in rad/s)
- r = Radius of the circular path (in m)
- v = Linear speed or tangential velocity (in m/s)
Formula: Centripetal Acceleration
a = ω2r = \[\frac {v^2}{r}\] = ωv
where:
-
a = Centripetal acceleration (in m/s²)
Formula: Time Period of Conical Pendulum
T = 2π\[\sqrt{\frac{l\cos\theta}{g}}\]
Forces acting on the bob:
- T cos θ — balances the weight mg (vertical component)
- T sin θ — provides the centripetal force (horizontal component)
Key Points
Key Points: Position-time, Velocity-time and Acceleration-time Graphs
- Slope of x-t graph = Velocity → Horizontal line (x = constant) = rest; positive slope = uniform velocity along +X axis; negative slope = motion along −X axis; curve = non-uniform velocity.
- Slope of v-t graph = Acceleration → Horizontal line = zero acceleration (constant velocity); positive slope = constant positive acceleration; negative slope = constant negative acceleration; curve = non-uniform acceleration.
- Area under v-t graph = Displacement of the object during that time interval.
- x-t graph shapes → Zigzag/oscillatory curve = oscillatory motion with constant speed; ever-increasing curve = accelerated (non-uniform) motion.
- Relative Velocity → \[\vec v_{AB}\] = \[\vec v_A\] − \[\vec v_B\] and \[\vec v_{BA}\] = \[\vec v_B\] − \[\vec v_A\]; they are always equal in magnitude and opposite in direction.
Key Points: Projectile Motion
- Horizontal range is maximum at 45° and reduces for any other angle of projection.
- A projectile has two simultaneous independent motions — constant horizontal and gravity-driven vertical.
- The path is a symmetric parabola — equal time up and down, equal speed at the same height.
Key Points: Uniform Circular Motion
- In UCM, speed is constant, but velocity continuously changes direction, always remaining tangential to the path.
- Angular displacement is the angle swept by the radius vector; angular velocity is its rate of change.
- Even at constant speed, centripetal acceleration is never zero — it always acts towards the centre of the circular path.
- Centripetal force is always directed towards the centre and is essential to maintain circular motion — it does no work on the body.
- If speed is constant in circular motion, tangential acceleration = 0, but radial acceleration ≠ 0.
Key Points: Conical Pendulum
- Structure — A conical pendulum consists of a weight (bob) fixed on a string suspended from a pivot, where the bob revolves in a horizontal circle and the string describes a cone whose vertex is the fixed point.
- Time Period depends on — Length of pendulum (l), acceleration due to gravity (g), and angle of inclination (θ); given by T = 2π\[\sqrt{\frac{l\cos\theta}{g}}\].
- Force Analysis — The vertical component of tension (T cos θ) balances gravity (mg), while the horizontal component (T sin θ) acts as the centripetal force to maintain circular motion.
Concepts [21]
- Concept of Motion
- Rectilinear Motion
- Displacement
- Path Length
- Average Velocity
- Average Speed
- Instantaneous Velocity
- Instantaneous Speed
- Position-time, Velocity-time and Acceleration-time Graphs
- Acceleration in Linear Motion
- Relative Velocity
- Motion in Two Dimensions - Motion in a Plane
- Average and Instantaneous Velocities
- Acceleration in a Plane
- Equations of Motion in a Plane with Constant Acceleration
- Relative Velocity in Two Dimensions
- Projectile Motion
- Uniform Circular Motion (UCM)
- Key Parameters of Circular Motion
- Centripetal Acceleration
- Conical Pendulum
